Other Parts Discussed in Thread: SYSCONFIG, , TCAN1044-Q1
Tool/software:
Hi Team,
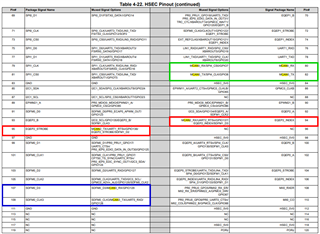
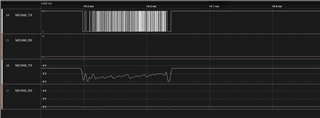
MCAN0 is directly coming on HSEC connector (CAN_Tx - Pin no.82 and CAN_Rx - Pin no - 80). Then why I am not getting CAN Tx signal on pin 82 of HSEC Docking station.
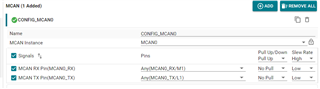
Please find below are syscfg tool configuration and interrupt method code file.
/*
* Copyright (C) 2021 Texas Instruments Incorporated
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/* This example demonstrates the CAN message transmission and reception in
* digital loop back mode with the following configuration.
*
* CAN FD Message Format.
* Message ID Type is Standard, Msg Id 0xC0.
* MCAN is configured in Interrupt Mode.
* MCAN Interrupt Line Number 0.
* Arbitration Bit Rate 1Mbps.
* Data Bit Rate 5Mbps.
* Buffer mode is used for Tx and RX to store message in message RAM.
*
* Message is transmitted and received back internally using internal loopback
* mode. When the received message id and the data matches with the transmitted
* one, then the example is completed.
*
*/
#include <stdio.h>
#include <kernel/dpl/DebugP.h>
#include <kernel/dpl/AddrTranslateP.h>
#include <kernel/dpl/SemaphoreP.h>
#include <drivers/mcan.h>
#include "ti_drivers_config.h"
#include "ti_drivers_open_close.h"
#include "ti_board_open_close.h"
#define APP_MCAN_BASE_ADDR (CONFIG_MCAN0_BASE_ADDR)
#define APP_MCAN_INTR_NUM (CONFIG_MCAN0_INTR)
#define APP_MCAN_MSG_LOOP_COUNT (10U)
/* Allocate Message RAM memory section to filter elements, buffers, FIFO */
/* Maximum STD Filter Element can be configured is 128 */
#define APP_MCAN_STD_ID_FILTER_CNT (1U)
/* Maximum EXT Filter Element can be configured is 64 */
#define APP_MCAN_EXT_ID_FILTER_CNT (0U)
/* Maximum TX Buffer + TX FIFO, combined can be configured is 32 */
#define APP_MCAN_TX_BUFF_CNT (1U)
#define APP_MCAN_TX_FIFO_CNT (0U)
/* Maximum TX Event FIFO can be configured is 32 */
#define APP_MCAN_TX_EVENT_FIFO_CNT (0U)
/* Maximum RX FIFO 0 can be configured is 64 */
#define APP_MCAN_FIFO_0_CNT (0U)
/* Maximum RX FIFO 1 can be configured is 64 and
* rest of the memory is allocated to RX buffer which is again of max size 64 */
#define APP_MCAN_FIFO_1_CNT (0U)
/* Standard Id configured in this app */
#define APP_MCAN_STD_ID (0xC0U)
#define APP_MCAN_STD_ID_MASK (0x7FFU)
#define APP_MCAN_STD_ID_SHIFT (18U)
#define APP_MCAN_EXT_ID_MASK (0x1FFFFFFFU)
/* In the CAN FD format, the Data length coding differs from the standard CAN.
* In case of standard CAN it is 8 bytes */
static const uint8_t gMcanDataSize[16U] = {0U, 1U, 2U, 3U,
4U, 5U, 6U, 7U,
8U, 12U, 16U, 20U,
24U, 32U, 48U, 64U};
/* Semaphore to indicate transfer completion */
static SemaphoreP_Object gMcanTxDoneSem, gMcanRxDoneSem;
static HwiP_Object gMcanHwiObject;
static uint32_t gMcanBaseAddr;
/* Static Function Declarations */
static void App_mcanIntrISR(void *arg);
static void App_mcanConfig(Bool enableInternalLpbk);
static void App_mcanInitMsgRamConfigParams(
MCAN_MsgRAMConfigParams *msgRAMConfigParams);
static void App_mcanEnableIntr(void);
static void App_mcanConfigTxMsg(MCAN_TxBufElement *txMsg);
static void App_mcanCompareMsg(MCAN_TxBufElement *txMsg,
MCAN_RxBufElement *rxMsg);
static void App_mcanInitStdFilterElemParams(
MCAN_StdMsgIDFilterElement *stdFiltElem,
uint32_t bufNum);
void mcan_loopback_interrupt_main(void *args)
{
int32_t status = SystemP_SUCCESS;
HwiP_Params hwiPrms;
MCAN_TxBufElement txMsg;
MCAN_ProtocolStatus protStatus;
MCAN_RxBufElement rxMsg;
MCAN_RxNewDataStatus newDataStatus;
MCAN_ErrCntStatus errCounter;
uint32_t i, bufNum, fifoNum, bitPos = 0U;
/* Open drivers to open the UART driver for console */
Drivers_open();
Board_driversOpen();
DebugP_log("[MCAN] Loopback Interrupt mode, application started ...\r\n");
/* Construct Tx/Rx Semaphore objects */
status = SemaphoreP_constructBinary(&gMcanTxDoneSem, 0);
DebugP_assert(SystemP_SUCCESS == status);
status = SemaphoreP_constructBinary(&gMcanRxDoneSem, 0);
DebugP_assert(SystemP_SUCCESS == status);
/* Register interrupt */
HwiP_Params_init(&hwiPrms);
hwiPrms.intNum = APP_MCAN_INTR_NUM;
hwiPrms.callback = &App_mcanIntrISR;
status = HwiP_construct(&gMcanHwiObject, &hwiPrms);
DebugP_assert(status == SystemP_SUCCESS);
/* Assign MCAN instance address */
gMcanBaseAddr = (uint32_t) AddrTranslateP_getLocalAddr(APP_MCAN_BASE_ADDR);
/* Configure MCAN module, Enable LoopBack Mode */
App_mcanConfig(TRUE);
/* Enable Interrupts */
App_mcanEnableIntr();
/* Transmit And Receive Message */
for (i = 0U; i < APP_MCAN_MSG_LOOP_COUNT; i++)
{
/* Configure Tx Msg to transmit */
App_mcanConfigTxMsg(&txMsg);
/* Select buffer number, 32 buffers available */
bufNum = 0U;
/* Enable Transmission interrupt for the selected buf num,
* If FIFO is used, then need to send FIFO start index until FIFO count */
status = MCAN_txBufTransIntrEnable(gMcanBaseAddr, bufNum, (uint32_t)TRUE);
DebugP_assert(status == CSL_PASS);
/* Write message to Msg RAM */
MCAN_writeMsgRam(gMcanBaseAddr, MCAN_MEM_TYPE_BUF, bufNum, &txMsg);
/* Add request for transmission, This function will trigger transmission */
status = MCAN_txBufAddReq(gMcanBaseAddr, bufNum);
DebugP_assert(status == CSL_PASS);
/* Wait for Tx completion */
SemaphoreP_pend(&gMcanTxDoneSem, SystemP_WAIT_FOREVER);
MCAN_getProtocolStatus(gMcanBaseAddr, &protStatus);
/* Checking for Tx Errors */
if (((MCAN_ERR_CODE_NO_ERROR != protStatus.lastErrCode) ||
(MCAN_ERR_CODE_NO_CHANGE != protStatus.lastErrCode)) &&
((MCAN_ERR_CODE_NO_ERROR != protStatus.dlec) ||
(MCAN_ERR_CODE_NO_CHANGE != protStatus.dlec)) &&
(0U != protStatus.pxe))
{
DebugP_assert(FALSE);
}
/* Wait for Rx completion */
SemaphoreP_pend(&gMcanRxDoneSem, SystemP_WAIT_FOREVER);
/* Checking for Rx Errors */
MCAN_getErrCounters(gMcanBaseAddr, &errCounter);
DebugP_assert((0U == errCounter.recErrCnt) &&
(0U == errCounter.canErrLogCnt));
/* Get the new data staus, indicates buffer num which received message */
MCAN_getNewDataStatus(gMcanBaseAddr, &newDataStatus);
MCAN_clearNewDataStatus(gMcanBaseAddr, &newDataStatus);
/* Select buffer and fifo number, Buffer is used in this app */
bufNum = 0U;
fifoNum = MCAN_RX_FIFO_NUM_0;
bitPos = (1U << bufNum);
if (bitPos == (newDataStatus.statusLow & bitPos))
{
MCAN_readMsgRam(gMcanBaseAddr, MCAN_MEM_TYPE_BUF, bufNum, fifoNum, &rxMsg);
}
else
{
DebugP_assert(FALSE);
}
/* Compare Tx/Rx data */
App_mcanCompareMsg(&txMsg, &rxMsg);
}
/* De-Construct Tx/Rx Semaphore objects */
HwiP_destruct(&gMcanHwiObject);
SemaphoreP_destruct(&gMcanTxDoneSem);
SemaphoreP_destruct(&gMcanRxDoneSem);
DebugP_log("All tests have passed!!\r\n");
Board_driversClose();
Drivers_close();
return;
}
static void App_mcanConfig(Bool enableInternalLpbk)
{
MCAN_StdMsgIDFilterElement stdFiltElem[APP_MCAN_STD_ID_FILTER_CNT] = {0U};
MCAN_InitParams initParams = {0U};
MCAN_ConfigParams configParams = {0U};
MCAN_MsgRAMConfigParams msgRAMConfigParams = {0U};
MCAN_BitTimingParams bitTimes = {0U};
uint32_t i;
/* Initialize MCAN module initParams */
MCAN_initOperModeParams(&initParams);
/* CAN FD Mode and Bit Rate Switch Enabled */
initParams.fdMode = TRUE;
initParams.brsEnable = TRUE;
/* Initialize MCAN module Global Filter Params */
MCAN_initGlobalFilterConfigParams(&configParams);
/* Initialize MCAN module Bit Time Params */
/* Configuring default 1Mbps and 5Mbps as nominal and data bit-rate resp */
MCAN_initSetBitTimeParams(&bitTimes);
/* Initialize MCAN module Message Ram Params */
App_mcanInitMsgRamConfigParams(&msgRAMConfigParams);
/* Initialize Filter element to receive msg, should be same as tx msg id */
for (i = 0U; i < APP_MCAN_STD_ID_FILTER_CNT; i++)
{
App_mcanInitStdFilterElemParams(&stdFiltElem[i], i);
}
/* wait for memory initialization to happen */
while (FALSE == MCAN_isMemInitDone(gMcanBaseAddr))
{}
/* Put MCAN in SW initialization mode */
MCAN_setOpMode(gMcanBaseAddr, MCAN_OPERATION_MODE_SW_INIT);
while (MCAN_OPERATION_MODE_SW_INIT != MCAN_getOpMode(gMcanBaseAddr))
{}
/* Initialize MCAN module */
MCAN_init(gMcanBaseAddr, &initParams);
/* Configure MCAN module Gloabal Filter */
MCAN_config(gMcanBaseAddr, &configParams);
/* Configure Bit timings */
MCAN_setBitTime(gMcanBaseAddr, &bitTimes);
/* Configure Message RAM Sections */
MCAN_msgRAMConfig(gMcanBaseAddr, &msgRAMConfigParams);
/* Set Extended ID Mask */
MCAN_setExtIDAndMask(gMcanBaseAddr, APP_MCAN_EXT_ID_MASK);
/* Configure Standard ID filter element */
for (i = 0U; i < APP_MCAN_STD_ID_FILTER_CNT; i++)
{
MCAN_addStdMsgIDFilter(gMcanBaseAddr, i, &stdFiltElem[i]);
}
if (TRUE == enableInternalLpbk)
{
MCAN_lpbkModeEnable(gMcanBaseAddr, MCAN_LPBK_MODE_INTERNAL, TRUE);
}
/* Take MCAN out of the SW initialization mode */
MCAN_setOpMode(gMcanBaseAddr, MCAN_OPERATION_MODE_NORMAL);
while (MCAN_OPERATION_MODE_NORMAL != MCAN_getOpMode(gMcanBaseAddr))
{}
return;
}
static void App_mcanConfigTxMsg(MCAN_TxBufElement *txMsg)
{
uint32_t i;
/* Initialize message to transmit */
MCAN_initTxBufElement(txMsg);
/* Standard message identifier 11 bit, stored into ID[28-18] */
txMsg->id = ((APP_MCAN_STD_ID & MCAN_STD_ID_MASK) << MCAN_STD_ID_SHIFT);
txMsg->dlc = MCAN_DATA_SIZE_64BYTES; /* Payload size is 64 bytes */
txMsg->fdf = TRUE; /* CAN FD Frame Format */
txMsg->xtd = FALSE; /* Extended id not configured */
for (i = 0U; i < gMcanDataSize[MCAN_DATA_SIZE_64BYTES]; i++)
{
txMsg->data[i] = i;
}
return;
}
static void App_mcanInitStdFilterElemParams(MCAN_StdMsgIDFilterElement *stdFiltElem,
uint32_t bufNum)
{
/* sfid1 defines the ID of the standard message to be stored. */
stdFiltElem->sfid1 = APP_MCAN_STD_ID;
/* As buffer mode is selected, sfid2 should be bufNum[0 - 63] */
stdFiltElem->sfid2 = bufNum;
/* Store message in buffer */
stdFiltElem->sfec = MCAN_STD_FILT_ELEM_BUFFER;
/* Below configuration is ignored if message is stored in buffer */
stdFiltElem->sft = MCAN_STD_FILT_TYPE_RANGE;
return;
}
static void App_mcanEnableIntr(void)
{
MCAN_enableIntr(gMcanBaseAddr, MCAN_INTR_MASK_ALL, (uint32_t)TRUE);
MCAN_enableIntr(gMcanBaseAddr,
MCAN_INTR_SRC_RES_ADDR_ACCESS, (uint32_t)FALSE);
/* Select Interrupt Line 0 */
MCAN_selectIntrLine(gMcanBaseAddr, MCAN_INTR_MASK_ALL, MCAN_INTR_LINE_NUM_0);
/* Enable Interrupt Line */
MCAN_enableIntrLine(gMcanBaseAddr, MCAN_INTR_LINE_NUM_0, (uint32_t)TRUE);
return;
}
static void App_mcanInitMsgRamConfigParams(MCAN_MsgRAMConfigParams
*msgRAMConfigParams)
{
int32_t status;
MCAN_initMsgRamConfigParams(msgRAMConfigParams);
/* Configure the user required msg ram params */
msgRAMConfigParams->lss = APP_MCAN_STD_ID_FILTER_CNT;
msgRAMConfigParams->lse = APP_MCAN_EXT_ID_FILTER_CNT;
msgRAMConfigParams->txBufCnt = APP_MCAN_TX_BUFF_CNT;
msgRAMConfigParams->txFIFOCnt = APP_MCAN_TX_FIFO_CNT;
/* Buffer/FIFO mode is selected */
msgRAMConfigParams->txBufMode = MCAN_TX_MEM_TYPE_BUF;
msgRAMConfigParams->txEventFIFOCnt = APP_MCAN_TX_EVENT_FIFO_CNT;
msgRAMConfigParams->rxFIFO0Cnt = APP_MCAN_FIFO_0_CNT;
msgRAMConfigParams->rxFIFO1Cnt = APP_MCAN_FIFO_1_CNT;
/* FIFO blocking mode is selected */
msgRAMConfigParams->rxFIFO0OpMode = MCAN_RX_FIFO_OPERATION_MODE_BLOCKING;
msgRAMConfigParams->rxFIFO1OpMode = MCAN_RX_FIFO_OPERATION_MODE_BLOCKING;
status = MCAN_calcMsgRamParamsStartAddr(msgRAMConfigParams);
DebugP_assert(status == CSL_PASS);
return;
}
static void App_mcanCompareMsg(MCAN_TxBufElement *txMsg,
MCAN_RxBufElement *rxMsg)
{
uint32_t i;
if (((txMsg->id >> APP_MCAN_STD_ID_SHIFT) & APP_MCAN_STD_ID_MASK) ==
((rxMsg->id >> APP_MCAN_STD_ID_SHIFT) & APP_MCAN_STD_ID_MASK))
{
for (i = 0U; i < gMcanDataSize[MCAN_DATA_SIZE_64BYTES]; i++)
{
if (txMsg->data[i] != rxMsg->data[i])
{
DebugP_logError("Data mismatch !!!\r\n");
DebugP_assert(FALSE);
}
}
}
else
{
DebugP_logError("Message ID mismatch !!!\r\n");
DebugP_assert(FALSE);
}
return;
}
static void App_mcanIntrISR(void *arg)
{
uint32_t intrStatus;
intrStatus = MCAN_getIntrStatus(gMcanBaseAddr);
MCAN_clearIntrStatus(gMcanBaseAddr, intrStatus);
if (MCAN_INTR_SRC_TRANS_COMPLETE ==
(intrStatus & MCAN_INTR_SRC_TRANS_COMPLETE))
{
SemaphoreP_post(&gMcanTxDoneSem);
}
/* If FIFO0/FIFO1 is used, then MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG macro
* needs to be replaced by MCAN_INTR_SRC_RX_FIFO0_NEW_MSG/
* MCAN_INTR_SRC_RX_FIFO1_NEW_MSG respectively */
if (MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG ==
(intrStatus & MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG))
{
SemaphoreP_post(&gMcanRxDoneSem);
}
return;
}
This is very urgent for project milestones and delivery. Please review and support on this. Is there any example where MCAN0 is used?
Thanks & Regards,
Sadaiyandi.G.