Part Number: TM4C1232H6PM
Tool/software:
Hello,
I'm working on my CAN_ISR (using TivaWare) which looks something like this:
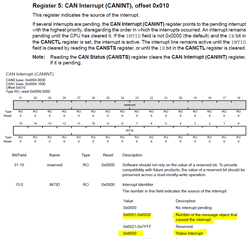
void _canISR(uint32_t CAN_BASE){uint32_t status = 0x00;uint32_t ui32Status = 0x00;ui32Status = CANIntStatus(CAN_BASE, CAN_INT_STS_CAUSE);//status interrupt or highest priority message interrupt with pending interruptif ((ui32Status == CAN_INT_INTID_STATUS) || ((ui32Status <= 32) && (ui32Status > 0))){status = CANStatusGet(CAN_BASE, CAN_STS_CONTROL);
if (status & CAN_STATUS_RXOK){...
}
}
I now encounter the problem where status is 0 but ui32Status is not 0 and I don't understand how this can happen. Doesnt every message interrupt also cause a status interrupt?