Part Number: AM2434
Other Parts Discussed in Thread: TIDEP-01032,
Tool/software:
Dear TI experts,
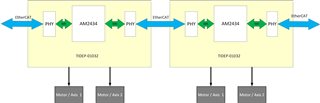
we want to combine two TIDEP-01032 Dual Motor Controllers on a single board to build a four-axes controller.
To this end, we need to connect the two Sitara AM2434 by EtherCAT to have each of them operate as an individual EtherCAT node.
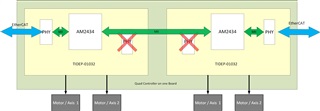
As this takes place on one board, we want to omit the PHYs between the two Sitaras and connect the RGMIIs back-to-back.
1) Are there any recommendations on how to do this?
2) Can the TIDEP-01032 PRU-ICSS EtherCAT firmware be configured to use MII instead of RGMII?
3) Is there a recommendation on how a back-to-back configuration could be achieved with MII instead of RGMII? A potential difficulty are the TXC / RXC signals, as in MII both are outputs of the PHY.
4) Can the FW be configured to run MII on one port and RGMII on the second port?
Thank you
Claus