Part Number: AM2432
Other Parts Discussed in Thread: SYSCONFIG,
Tool/software:
Hi TI Experts,
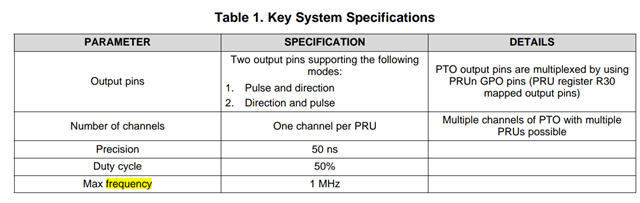
In AM335x, we have a below application note that describes how to perform high performance pulse train output (PTO) with PRU-ICSS.
High Performance Pulse Train Output (PTO) With PRU-ICSS for Industrial Applications.pdf
And it could achieve maximum 1MHz outputting pulse + direction.
Customer wants to the similar design on AM243, may I know if it is feasible or not, since we also have PRU in AM243?
The only difference is that customer outputs pulse + pulse not pulse + direction.
Customer is also wondering if they could achieve higher frequency greater that what we achieved 1MHz in AM335x?
Many Thanks,
Kevin