Other Parts Discussed in Thread: TPS929240EVM, LAUNCHXL2-570LC43,
Tool/software:
First, we describe the context of the functionality to be implemented.
We want to control the Led Driver: TPS929240EVM through CAN frames sent through a CAN communications bus by the MCU TMS570LC4357, more specifically the board: LAUNCHXL2-570LC43.
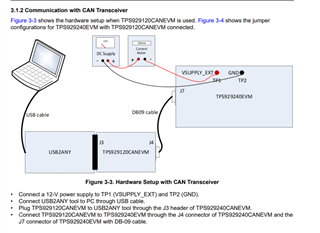
The communication channel used between both components is through the CAN communications bus, in the receiver part, TPS929240EVM, it will be connected to the “J7” connector which will communicate through the CAN Transceiver: TCAN1042HGDRQ1, with its core: “TPS929240QDCPRQ1”.
The idea is to encapsulate the Flex Wire frame in the data field of the CAN frame.
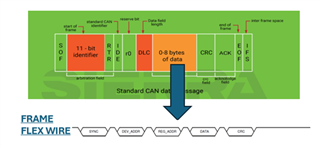
And on the receiver side, Led Driver (TPS929240EVM) the Flex Wire frame must be decapsulated from the CAN frame to control the operation of the LEDs. According to the documentation, the Flex Wire protocol uses the CAN physics layer, hence the frame encapsulation, similar to IP encapsulation over Ethernet.
However, on the receiver side, TPS929240EVM, the only component that could perform this task of decapsulating the Flex Wire frame from the CAN frame would be the CAN Transceiver: TCAN1042HGDRQ1, but it does not do so, its main function is to level the voltage levels, not to decapsulate the Flex Wire frame from the CAN frame.
From the context described above, several questions arise, which we describe below.
1. Is this approach possible? That is, we can use the CAN bus for communications between both peripherals.
2. Is there a driver developed that performs CAN-FLEX WIRE frame decapsulation available for the TMS570LC4357 MCU?
3. Is there a way to route the output of SCI_1, for example, to the output of DCAN1, on the TMS570LC4357 MCU?