Tool/software:
Hi experts,
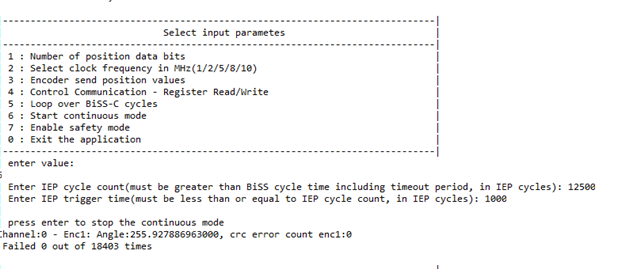
I am evaluating AM243x MCU+ SDK 09.02.00.09
The BissC encoder interface currently only runs in an 8kHz cycle,
but not in a 16kHz cycle.
What do I have to change so that the BissC encoder interface runs in a 16kHz cycle?
Best regards
Karl-Heinz