


Other Parts Discussed in Thread: LP-AM263, AM2634, SYSCONFIG
Tool/software:
Dear TI Technical Support Team,
I am encountering an issue with the ECAP module interrupt not triggering while working on the AM2632 chip nortos. I would greatly appreciate your help in analyzing the root cause.
Issue Description
-
Hardware Environment
-
Chip Model: AM2632
-
Core: R5FSS1-0
-
ECAP Module: ECAP0
-
Pin Configuration: PRO_PRUO_GPIO9/F17 (routed to ECAP0 via INPUT XBAR and INT_XBAR_22)
-
Input Signal: 80kHz square wave/Manually switch between 3.3 and GND
-
-
Observed Behavior
-
The input signal is confirmed present, but the ECAP interrupt service routine (ISR) is never invoked.
-
-
Troubleshooting Steps Performed
-
Verified the input signal integrity with an oscilloscope.
-
Confirmed pin multiplexing configuration (PRO_PRUO_GPIO6 is set to ECAP input mode).
-
Key Configuration Details
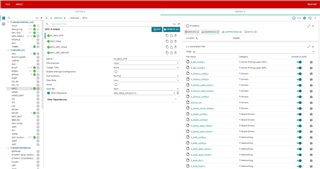
1. syscfg



Request for Guidance
-
Is the routing configuration for INPUT XBAR and INT_XBAR_22 correct?
-
Are there any critical settings missing in ECAP0 capture mode?
-
Are there additional registers that require configuration?
Thank you for your support! Looking forward to your feedback.
Best regards,
zx






