Other Parts Discussed in Thread: LAUNCHXL-F28P65X, LP-AM263, SYSCONFIG
Tool/software:
Hi Team,
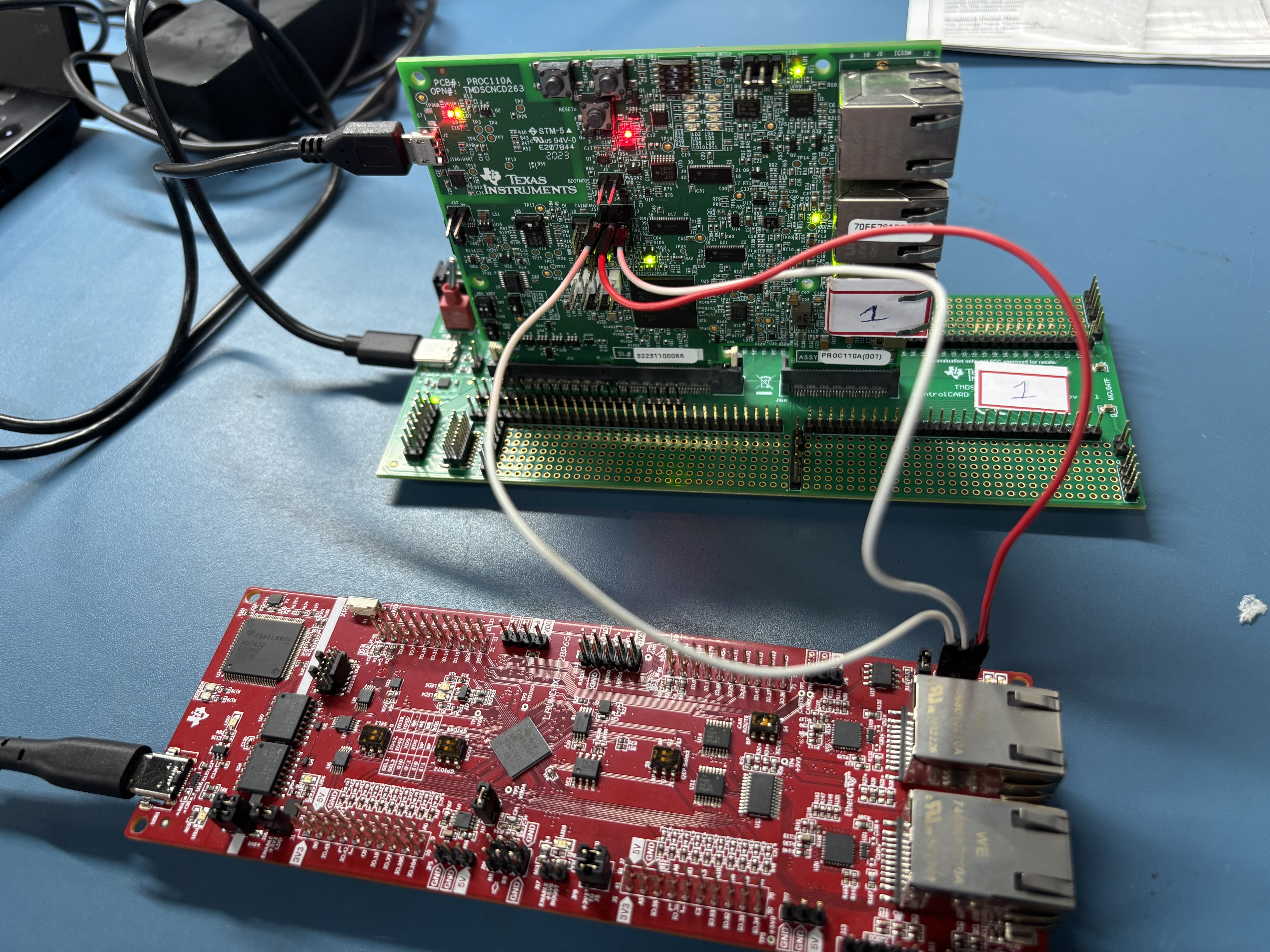
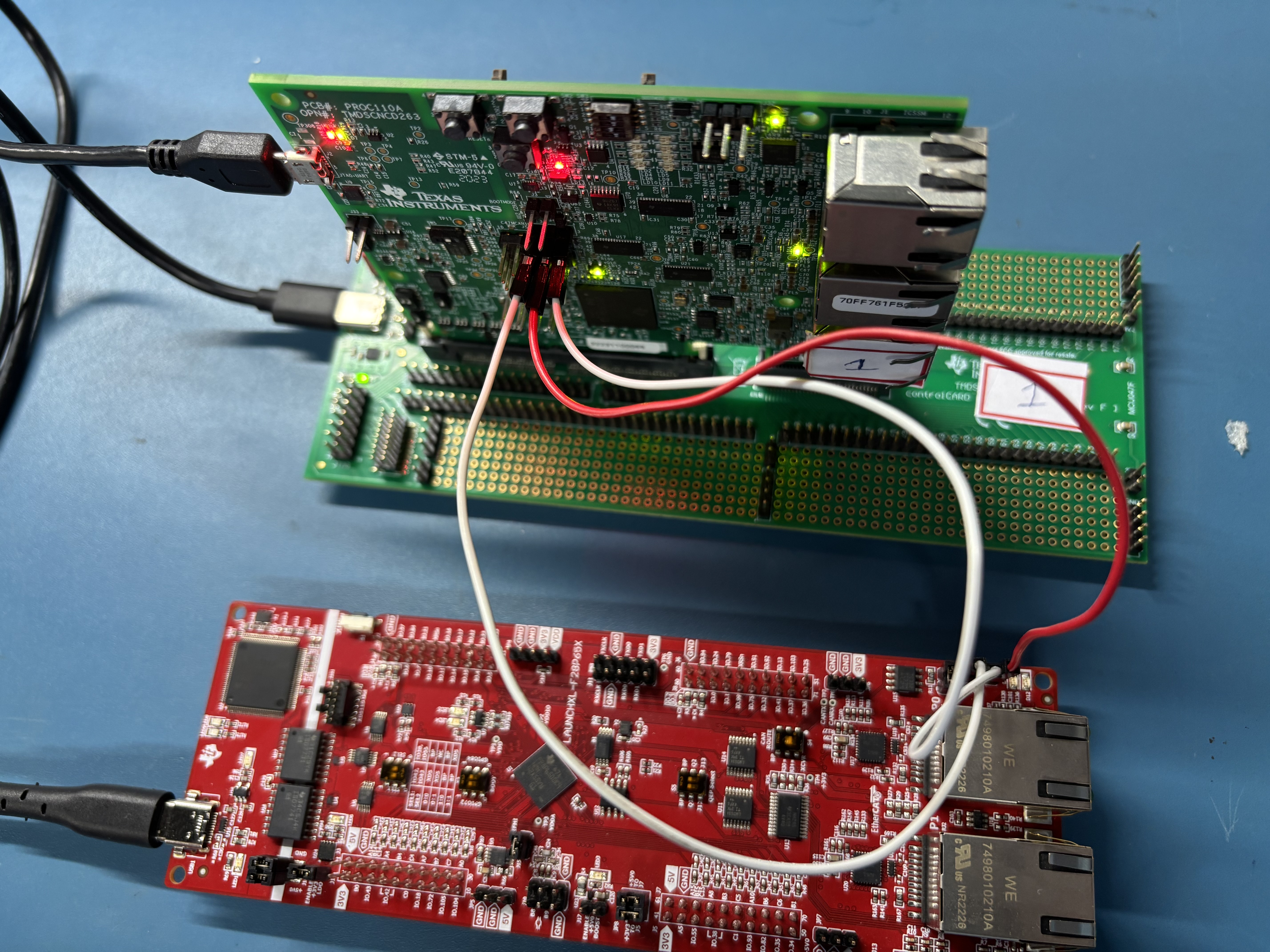
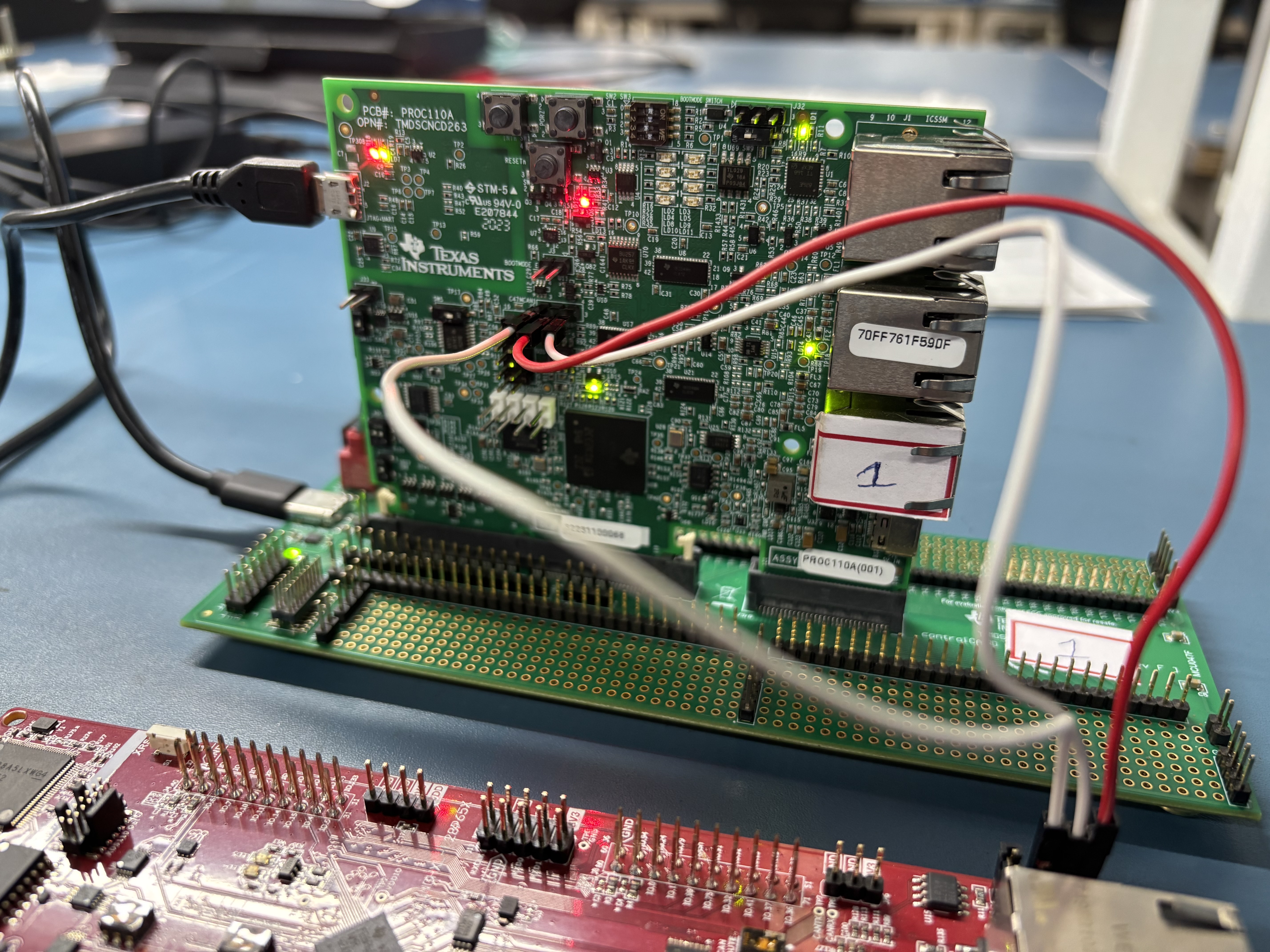
We are experiencing issues connecting the AM2634 board with the LaunchXL-F28P65X via CAN. We are unable to transmit data successfully over CAN. What configurations should we check on both boards to enable CAN communication? Are there any other factors we should consider?