Part Number: MCU-PLUS-SDK-AM263PX
Other Parts Discussed in Thread: LP-AM263P, TMDSCNCD263P, SYSCONFIG
Tool/software:
Title: Connecting AM263px TI Board to Code Composer Studio for CAN communication setup and deployment of ML prediction model on board.
Description:
We are working with the AM263px TI board to run a custom-developed model for prediction tasks. The inputs will be received from CAN and The output of the prediction will be transmitted using CAN.
We need assistance with the following tasks:
- Setup of standard or extended CAN communication with the AM263px TI board.
- Requirements for configuring the board within CCS.
- Instructions for compiling custom-developed model (GRU) and deploying code to the board and make it run.






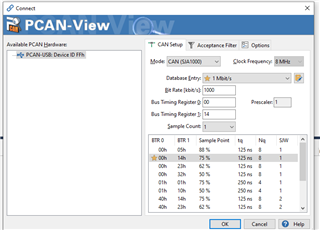
 This is my PCAN view config.
This is my PCAN view config.