Tool/software:
There are several problems in the configuration of CAN sampling points, which I would like to confirm:
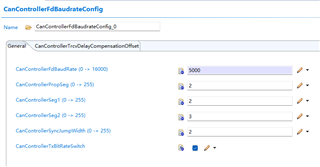
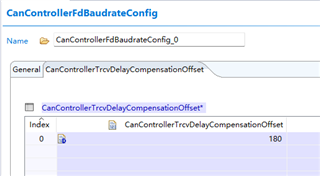
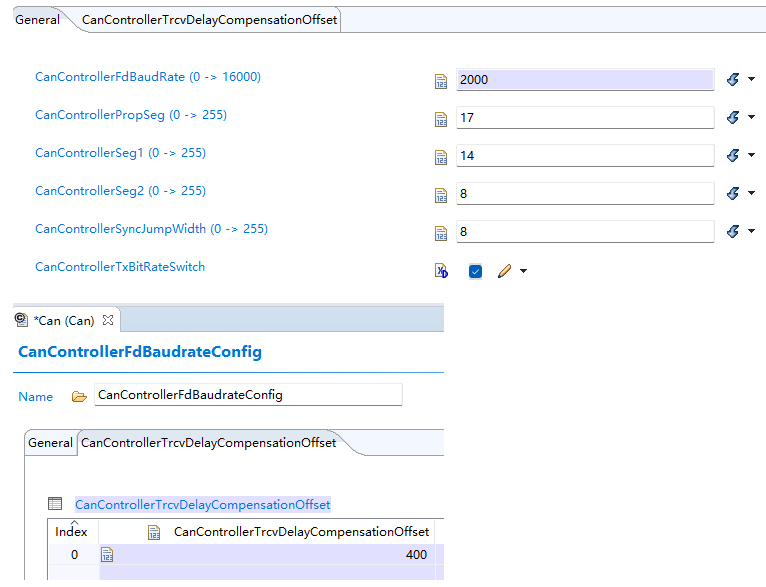
1. The sampling point data segment configuration requirement of CANFD is 80% of the sampling points. In the following figure, are the configuration parameters that the total number of TQS is 40 and the TDCO is 400 correct? What are the recommended configurations?
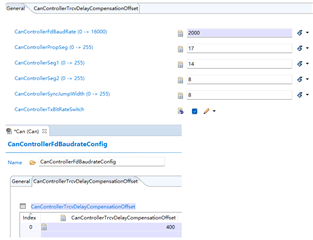
2. Why the configuration in EB, such as the above configuration, can only configure 400 at most, doesn't that mean that only 80% (400/500) sampling points can be configured.
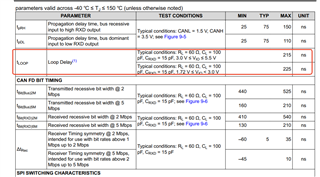
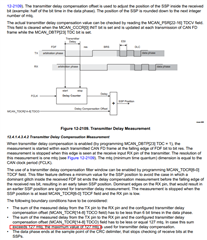
3.The description of the secondary sampling points in the manual is shown in the figure, whether it can be understood that the secondary sampling points are divided into two parts: the Delay Counter of automatic measurement and the TDCO in our EB configuration. Does the auto-measure part enable the SSP as soon as it is enabled?
4.Is there a way to test the configured TDCO? What is the impact if the TDCO in the first question is configured to 200?