


Part Number: LP-AM243
Tool/software:
Hello.
I am checking external communication for MCAN.
In this question, I am asking about loopback mode and external communication together.
The external communication question will be changed here.
Two LP2434s are used for external communication.
I want to check the CANID 11bit and 29bit external communication of my classic can.
I am using the sample code, mcan_loopback_interrupt.
I tested CANID 11bit send/receive as shown in the figure, but no receive interrupt occurs.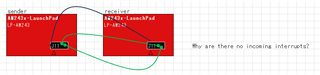
Question 1.
Jumper wires are used.
I am not sure what standard jumper wire I am using.
What kind of jumper wire can I use for external connections?
Question 2.
Is external communication possible by simply setting the loopback mode to FALSE?
If so, I don't understand why external communication is not possible with CANID 11bit.
sender
mcan_loopback_interrupt.c
・App_mcanConfig(FALSE);
・MCAN_InitParams::fdMode = FALSE
・MCAN_InitParams::brsEnable = FALSE
・Deletion of incoming process
receiver
mcan_loopback_interrupt.c
・App_mcanConfig(FALSE);
・MCAN_InitParams::fdMode = FALSE
・MCAN_InitParams::brsEnable = FALSE
・Transmission process deletion
Regards,
Yoshiki
