Part Number: AM263P4
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hey, I am evaluating the SDK ADC example "adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang".
The following combinations of SysConfig and SDK give compiled successfully.
*SysConfig : 1.21.0
*MCU+ SDK for AM263Px : 10.0.0.35
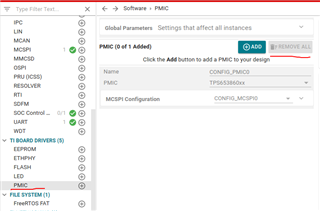
However, the following combinations of the latest SysConfig and SDK give
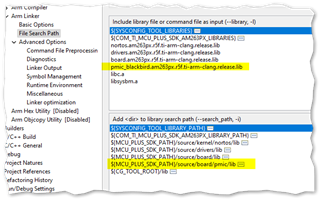
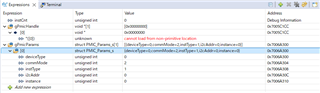
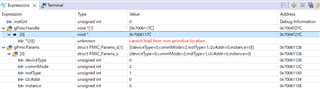
an error stating that the following PMIC driver is not defined.
Please tell me how to solve this.
(error #10234-D: unresolved symbols remain
error #10010: errors encountered during linking; )
*SysConfig : 1.22.0
*MCU+ SDK for AM263Px : 10.1.0.34
Thanks, T. Hirata
[Error masage]
Building target: "adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang.out"
Invoking: Arm Linker
"C:/ti/ti-cgt-armllvm_4.0.0.LTS/bin/tiarmclang.exe" -mcpu=cortex-r5 -mfloat-abi=hard -mfpu=vfpv3-d16 -mlittle-endian -mthumb -Os -DSOC_AM263PX -g -Wall -Wno-gnu-variable-sized-type-not-at-end -Wno-unused-function -Wl,-m"adc_burst_mode_oversampling.Release.map" -Wl,-i"C:/ti/mcu_plus_sdk_am263px_10_01_00_34/source/kernel/nortos/lib" -Wl,-i"C:/ti/mcu_plus_sdk_am263px_10_01_00_34/source/drivers/lib" -Wl,-i"C:/ti/mcu_plus_sdk_am263px_10_01_00_34/source/board/lib" -Wl,-i"C:/ti/ti-cgt-armllvm_4.0.0.LTS/lib" -Wl,--reread_libs -Wl,--diag_suppress=10063 -Wl,--diag_wrap=off -Wl,--display_error_number -Wl,--warn_sections -Wl,--xml_link_info="adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang_linkInfo.xml" -Wl,--ram_model -o "adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang.out" "./adc_burst_mode_oversampling.o" "./syscfg/ti_dpl_config.o" "./syscfg/ti_drivers_config.o" "./syscfg/ti_drivers_open_close.o" "./syscfg/ti_pinmux_config.o" "./syscfg/ti_power_clock_config.o" "./syscfg/ti_board_config.o" "./syscfg/ti_board_open_close.o" "./syscfg/ti_enet_config.o" "./syscfg/ti_enet_open_close.o" "./syscfg/ti_enet_soc.o" "./syscfg/ti_enet_lwipif.o" "./main.o" -Wl,-l"syscfg/linker.cmd" -Wl,-lnortos.am263px.r5f.ti-arm-clang.release.lib -Wl,-ldrivers.am263px.r5f.ti-arm-clang.release.lib -Wl,-lboard.am263px.r5f.ti-arm-clang.release.lib -Wl,-llibc.a -Wl,-llibsysbm.a
makefile:150: recipe for target 'adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang.out' failed
undefined first referenced
symbol in file
--------- ----------------
PMIC_close ./syscfg/ti_board_open_close.o
PMIC_configure ./syscfg/ti_board_open_close.o
PMIC_open ./syscfg/ti_board_open_close.o
error #10234-D: unresolved symbols remain
error #10010: errors encountered during linking; "adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang.out" not built
tiarmclang: error: tiarmlnk command failed with exit code 1 (use -v to see invocation)
gmake[1]: *** [adc_burst_mode_oversampling_am263px-cc_r5fss0-0_nortos_ti-arm-clang.out] Error 1
makefile:146: recipe for target 'all' failed
gmake: *** [all] Error 2
**** Build Finished ****