Tool/software:
Hello Team,
We have integrated CAN-FD with "MCAL_MSPM0_00.02.05.00_Internal".
We have observed that CANFD-TX and CANFD-RX work fine during runtime.
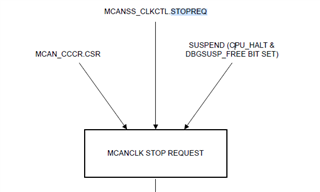
However, if we apply a breakpoint and execution halts at the breakpoint, or if we halt the execution for some time and then re-run the code,
CANFD-TX stops working. ( we observed that this fails to decrement the freeHwObjectCount, resulting in the CAN driver being in a busy state )
When the code runs fine without a breakpoint, we observe that the register MCAN_TXBTO updates correctly, indicating that the Tx Buffer Transmission occurred.
The behavior when the code execution stops at a breakpoint is uncertain.
When we resume the code, MCAN_TXBTO does not update, leaving the value at 0.
Also, the error counter starts incrementing, and eventually, communication stops.
Note: We have observed this behavior with both the Trace32 and CCS-XDS110 debuggers.
We would appreciate any insights or solutions you might have regarding this issue.
Regards,
Kiran