Part Number: TMS570LC4357
Tool/software:
Hello gundavarapu
I tested with your code and found that the RTI delay is not as accurate as it should be.
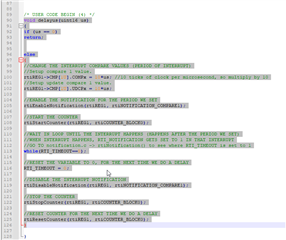
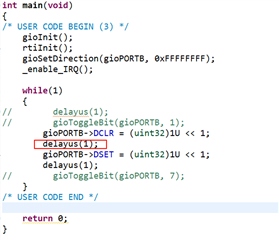
1. delayus(1);
2. The actual value tested by the oscilloscope

3. What is the minimum interval between interrupts that RTI can generate, and can it reach 100ns to generate an interrupt?
4. I've actually tried to test this with the compare notification function and got up to 450ns will generate an interrupt.
5. Another question, why is there no way for me to trigger the overflow interrupt for rti compare 0?
6. I will attach my project below.