Part Number: TM4C1231E6PZ
Other Parts Discussed in Thread: EK-TM4C123GXL, TM4C123GH6PM
Tool/software:
Hi TI,
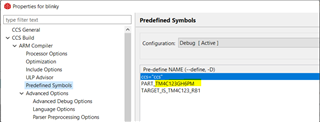
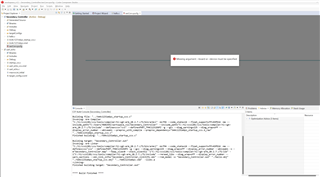
I created a simple project for TM4c1231e6pz controller just a hello world program. to this project created a new file .syscfg and i observe the attached error continuously says missing --board. To this configuration is the board needs to be connected and need to run.
how to fix this issue.
Thanks & regards,
manoj.