


Part Number: MSPM0G3507-Q1
Tool/software:
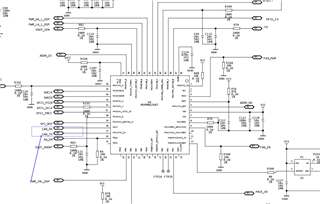

Hello! When I was debugging CAN communication, I encountered a situation where CAN_TX remained at a high level all the time. This is my hardware design. The program I wrote myself can communicate normally on the Demo board of TI. If it is used on the board designed by oneself, communication cannot be achieved, and CAN_TX remains at a high level all the time. Please help analyze whether there are any issues with the above circuit design, what points should be noted for the CAN communication of the M0G3507 chip, and what directions for troubleshooting are provided. Thank you!

