


Tool/software:
Hi all,
a customer is using the MCU+ SDK 10.2 and the starting point empty_am261x-lp_r5fss0-0_freertos_ti-arm-clang example.
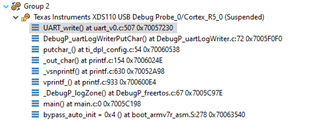
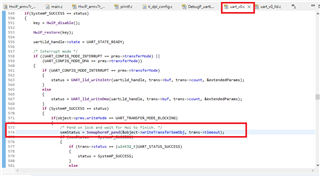
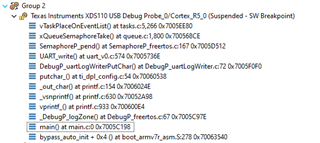
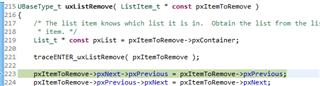
They are running into a problem where the execution gets stuck when using the DebugP_log API during initialization phase after board and driver init functions, but before task creation. Using the DebugP_log API within a task function is ok.
Is there a way to use the DebugP_log API before creating a task?
Thanks!
--Gunter


 ,
, .
.