Other Parts Discussed in Thread: SYSCONFIG, LP-AM261
Tool/software:
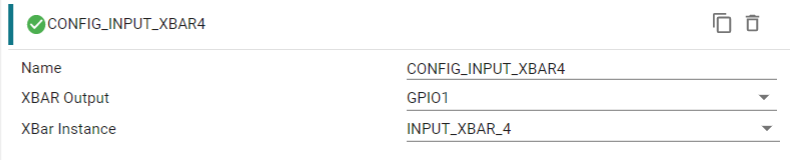
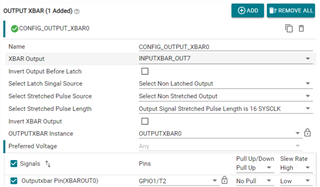
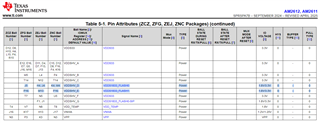
I configured GPIO47 as EPWM2A, and then configured GPIO47 to connect to inputxbar0, and then to ECAP0. I can capture the duty cycle and frequency of EPWM2A through ECAP0.
While keeping the EPWM2 and ECAP configurations unchanged, I configured GPIO59 as IO input, and changed the inputxbar0 configuration to connect to GPIO59. I connected GPIO47 and GPIO59 together externally with a wire (GPIO59 can be measured with an oscilloscope), but ECAP cannot capture any events. Why?

 GPIO Val is read.
GPIO Val is read.