Part Number: AM263P4
Other Parts Discussed in Thread: LVSERVOMTR
Tool/software:
Hi,
I am using AM263P LP, BOOSTXL 3phGANINV and LVSERVOMTR (Teknic M-2310P-LN-04K).
I want to control this motor using ESMO observer. When Motor state change with MOTOR_CL_RUNNING, Motor is rotating too fast in reverse.
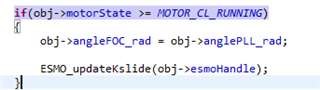
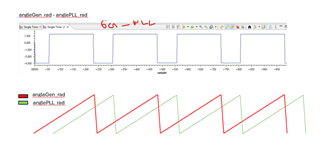
angleFOC_rad was changed with anglePLL_rad. When I compare anglePLL_rad and angleGen_rad signal, I see that there is phase difference between angleGen_rad and anglePLL_rad. Is a reason reverse rotariong of motor this?
The Parts I used ( AM263P LP (ported from AM263) , BOOSTXL 3phGANINV and LVSERVOMTR (Teknic M-2310P-LN-04K) was verified on UMC. it can't work properly for ESMO. I get it working properly with encoder.