Tool/software:
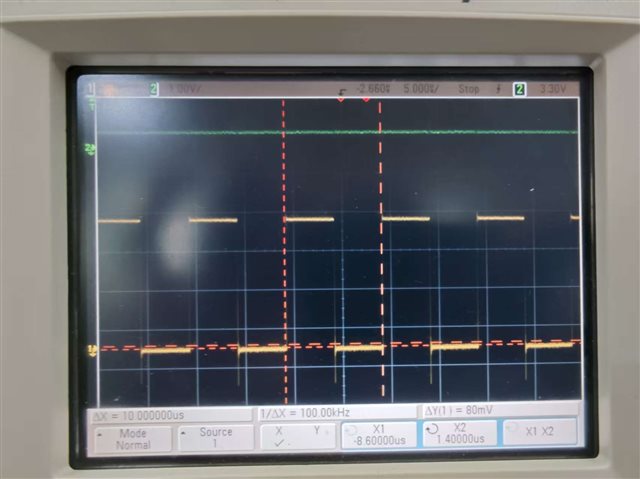
I defined a key command. After clicking the key, the DMA instruction for moving the array will be triggered and output through TIMER_PWM. The communication rate is 5us per bit, with a transition every 5us. Maybe there is a problem with my configuration in CCS_config. I don't know why the waveform I want to send doesn't appear. Instead, a repetitive waveform shows up and the sending doesn't stop. It doesn't end the sending after moving all the data in my array,Could you provide a successful example of sending a 5us pulse change for me to refer to when configuring CCS_Config?