Other Parts Discussed in Thread: TCA6424
Tool/software:
Hello,
I'm using the E2 version where OSPI reset is controlled via I2C Mux.
My application uses FreeRTOS but it seems I am unable to call TCA6424_setOutput() under two conditions:
Scenario 1
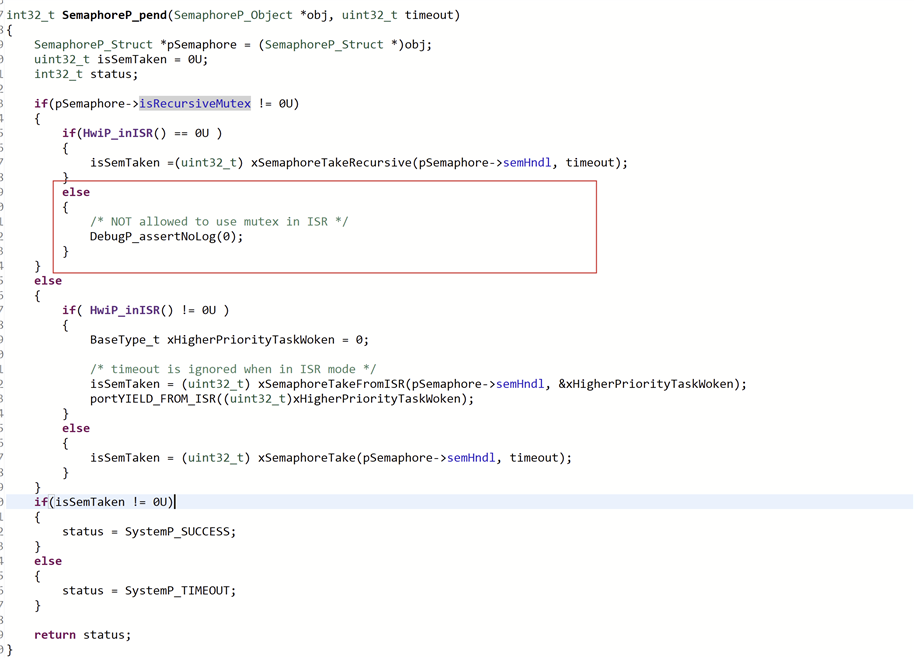
When trying to call TCA6424_setOutput() within an ISR it gets trapped by an assert here:

Scenario 2
When trying to call TCA6424_setOutput() in the FreeRTOS idle task, it gets trapped with the following message.
[Cortex_R5_0] ASSERT: 40.392078s: FreeRTOS-Kernel/tasks.c:vTaskSwitchContext:3063: (uint32_t)(uxTopPriority) failed !!!
<Q>
Under what conditions can I/can't I call TCA6424_setOutput() please?
Thank you.