Part Number: MSPM0L1306
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hello
I run demo code lin_responder with MSPM0L1306 LaunchPad Development Kit. The LIN master is Vector VN1630.
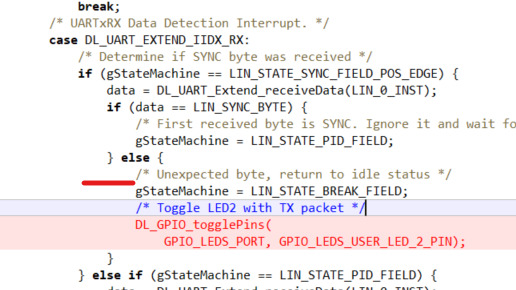
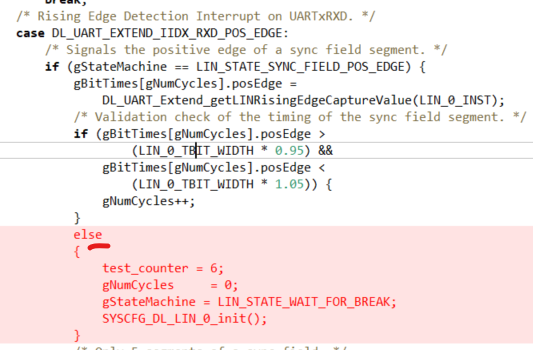
There are little change with demo code, see below pictures.
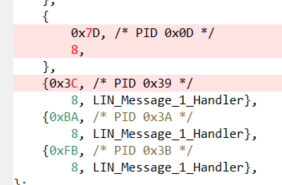
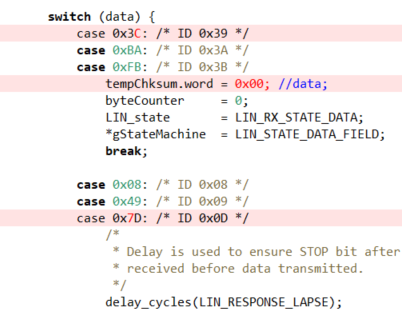
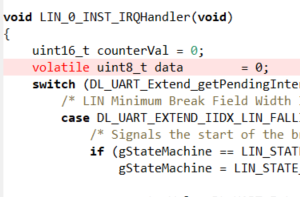

The TX and RX is abnormal and can not recover when enter else condition after DL_UART_EXTEND_IIDX_RX interrupt.
It happens accidental when LIN master start stop periodic with LIN slave keep power on, or happens accidental when LIN slave power on off periodic with LIN master keep work.
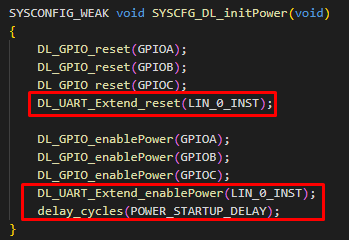
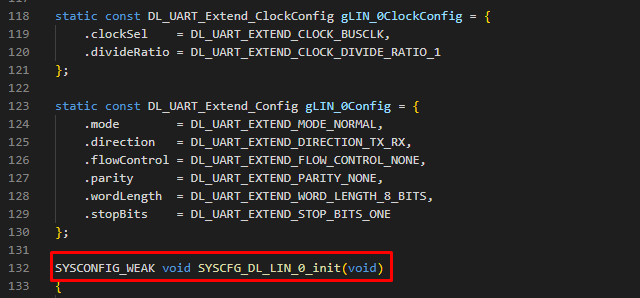
Why received SYNC byte is not 0x55? What function can be invoked to restart LIN, I try to use DL_UART_Extend_reset() but no change.