Part Number: MSPM0C1104
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hello Together,
i have just started developing on the MSPM0C1104 (using the SDK and CCS 20.2.0) and encountered a problem with the UART communication.
I am using the MSPM0C1104 as Uart reciever. I checked the bussignal with Osziloscope and the transfared data is looking good.
I was debuging with a breakpoint at the UART_0_INST_IRQHandler(void) and it never gets called although the data that is transfered is valid.
The Uart configuration is similar on sender and receiver.
Did i missed a register setting?
my code:
uart_receiver.c:
#include "uart_receiver.h"
#include "ti_msp_dl_config.h"
static void (*uart_rx_callback)(uint8_t, uint32_t) = 0;
static uint8_t uart_rx_buffer[4];
static uint8_t uart_rx_index = 0;
void uart_receiver_init(void) {
// RX interrupt already configured in ti_msp_dl_config.c
// Enable NVIC interrupt
NVIC_EnableIRQ(UART_0_INST_INT_IRQN);
}
void uart_set_rx_callback(void (*callback)(uint8_t, uint32_t)) {
uart_rx_callback = callback;
}
// UART interrupt handler
void UART_0_INST_IRQHandler(void) {
uint32_t status = DL_UART_Main_getPendingInterrupt(UART_0_INST);
if (status & DL_UART_MAIN_INTERRUPT_RX) {
uint8_t byte = DL_UART_Main_receiveData(UART_0_INST);
uart_rx_buffer[uart_rx_index++] = byte;
if (uart_rx_index == 4) {
uint8_t action = uart_rx_buffer[0];
uint32_t check = ((uint32_t)uart_rx_buffer[1] << 16) |
((uint32_t)uart_rx_buffer[2] << 8) |
((uint32_t)uart_rx_buffer[3]);
if (uart_rx_callback) {
uart_rx_callback(action, check);
}
uart_rx_index = 0; // Reset for next message
}
DL_UART_Main_clearInterruptStatus(UART_0_INST, DL_UART_MAIN_INTERRUPT_RX);
}
}
main:
void handle_uart_message(uint8_t action, uint32_t check) {
if ((check > check_comparator) && (check < (check_comparator + 5)) ) {
switch (action) {
case 0: Motor_Open();
case 1: Motor_Close();
case 2: Motor_OpenThenClose();
}
}
}
int main(void)
{
SYSCFG_DL_init();
Motor_init();
uart_set_rx_callback(handle_uart_message);
uart_receiver_init();
while (1) {
__WFI();
}
}
ti_msp_dl_config.c:
static const DL_UART_Main_ClockConfig gUART_0ClockConfig = {
.clockSel = DL_UART_MAIN_CLOCK_BUSCLK,
.divideRatio = DL_UART_MAIN_CLOCK_DIVIDE_RATIO_1
};
static const DL_UART_Main_Config gUART_0Config = {
.mode = DL_UART_MAIN_MODE_NORMAL,
.direction = DL_UART_MAIN_DIRECTION_RX,
.flowControl = DL_UART_MAIN_FLOW_CONTROL_NONE,
.parity = DL_UART_MAIN_PARITY_NONE,
.wordLength = DL_UART_MAIN_WORD_LENGTH_8_BITS,
.stopBits = DL_UART_MAIN_STOP_BITS_ONE
};
SYSCONFIG_WEAK void SYSCFG_DL_UART_0_init(void)
{
DL_UART_Main_setClockConfig(UART_0_INST, (DL_UART_Main_ClockConfig *) &gUART_0ClockConfig);
DL_UART_Main_init(UART_0_INST, (DL_UART_Main_Config *) &gUART_0Config);
/*
* Configure baud rate by setting oversampling and baud rate divisors.
* Target baud rate: 38400
* Actual baud rate: 38400
*/
DL_UART_Main_setOversampling(UART_0_INST, DL_UART_OVERSAMPLING_RATE_16X);
DL_UART_Main_setBaudRateDivisor(UART_0_INST, UART_0_IBRD_24_MHZ_38400_BAUD, UART_0_FBRD_24_MHZ_38400_BAUD);
/* Configure Interrupts */
DL_UART_Main_enableInterrupt(UART_0_INST,
DL_UART_MAIN_INTERRUPT_RX);
/* Setting the Interrupt Priority */
NVIC_SetPriority(UART_0_INST_INT_IRQN, 2);
/* Configure FIFOs */
DL_UART_Main_enableFIFOs(UART_0_INST);
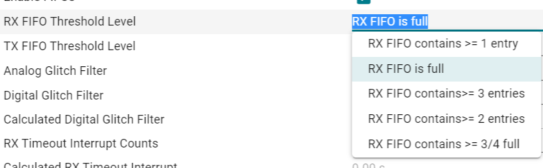
DL_UART_Main_setRXFIFOThreshold(UART_0_INST, DL_UART_RX_FIFO_LEVEL_FULL);
DL_UART_Main_enable(UART_0_INST);
}
If wanted i can share the whole projekt.
Thanks in advance for the support.