Part Number: AM2634
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Dear Expert
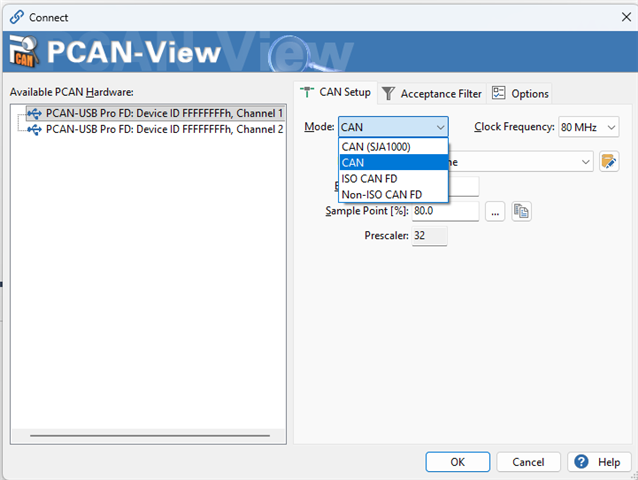
Customer setup a CAN system with 3 nodes connection: one CAN BOX setting as CAN FD, second CAN BOX setting as Classic CAN, and AM2634 MCAN0 setting as some channel in CAN FD with some channel in Classic CAN.
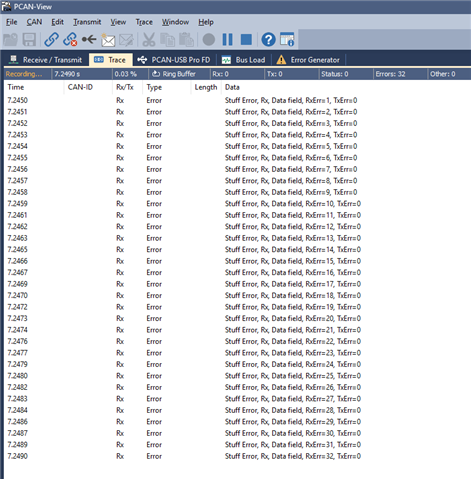
The communication between 3 nodes work well while the AM2634 only send/receive CAN FD message or only send/receive Classic CAN message. However after enable AM2634 send/receive both CAN FD and Classic CAN, it will happen many error frame.
Customer also test the F280039 to replace AM2634 in the CAN BUS, the communication work well even if F280039 send/receive both CAN FD and Classic CAN.
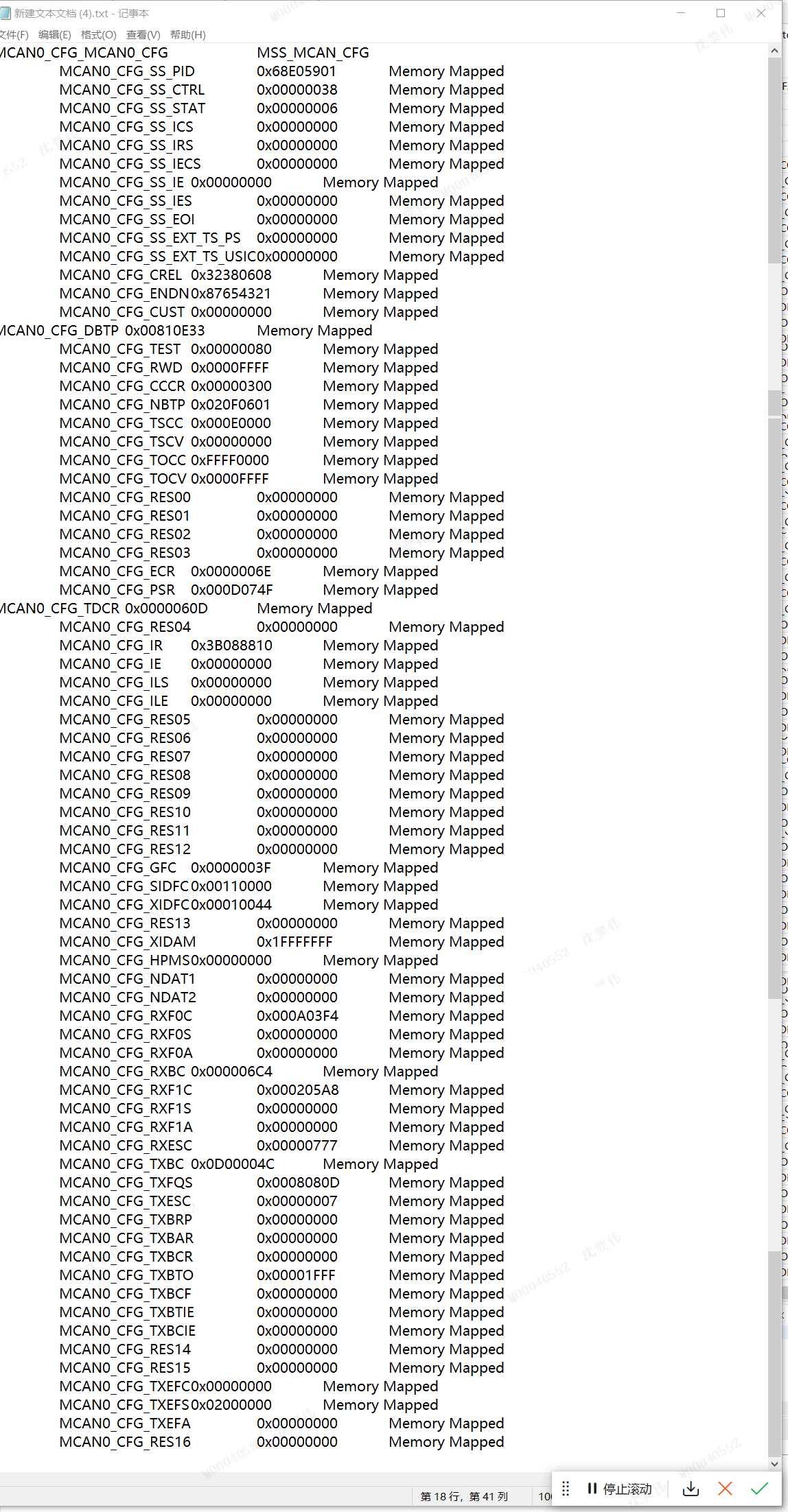
We double check the MCAN all register setting between F280039 and AM2634, there are almost same setting, except the F280039 MCAN clock set as 40Mhz / (7+1) and AM2634 MCAN clock set as 80Mhz / (15+1).
Do we get advice if any other difference between F280039 and AM2634 MCAN module may cause error frame happen only in AM2634?