Part Number: MSPM0G3507
After initializing and enabling the UART interrupt, we printed the following two parameters and found that when the parameters were 0x400 and 0, the UART interrupt could run in normally; When the parameters are 0x400 and 0x400, UART interrupt cannot enter (at this time, reinitialize and enable UART interrupt, print parameters are still 0x400 and 0x400, and UART interrupt still cannot enter).
This problem occurs probabilistically (with a probability of about one in ten).
Uart interrupt invalid:
0x400 = DL_UART_getEnabledInterrupts( UART_2_INST, DL_UART_MAIN_INTERRUPT_RX );
0x400 = DL_UART_getEnabledInterruptStatus( UART_2_INST, DL_UART_MAIN_INTERRUPT_RX );
Uart interrupt valid:
0x400 = DL_UART_getEnabledInterrupts( UART_2_INST, DL_UART_MAIN_INTERRUPT_RX );
0 = DL_UART_getEnabledInterruptStatus( UART_2_INST, DL_UART_MAIN_INTERRUPT_RX );
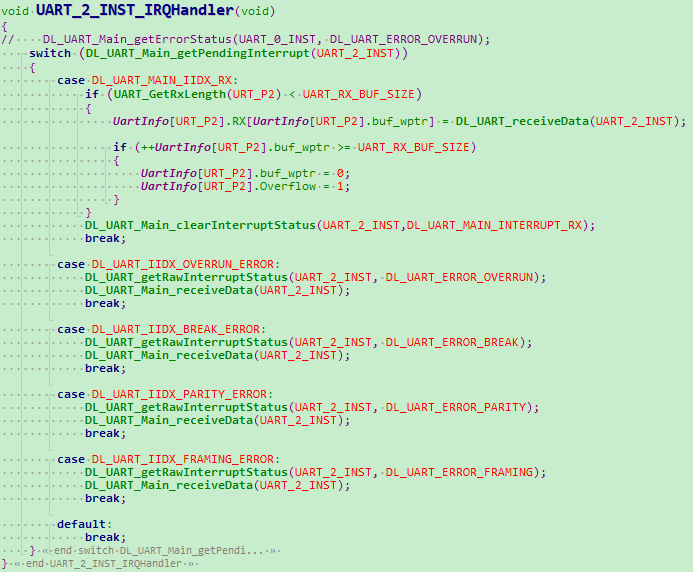
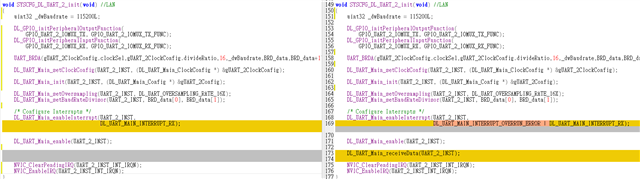
Here is our UART interrupt initialization and interrupt function: