Part Number: MSPM0G1507
Other Parts Discussed in Thread: SYSCONFIG
hi
I use example below sensorless FOC.
I change below based on tuning guide in isr.c
pUserInputRegs->isdCfg.w = 0x6644040A;
pUserInputRegs->closeLoop2.w = 0xB9900C90;
pUserInputRegs->systemParams.mtrResist = 3650;
pUserInputRegs->systemParams.mtrInductance = 189;//1265;
pUserInputRegs->systemParams.mtrBemfConst = 9;//400;5.672*2*pi/4=8.9
pUserInputRegs->systemParams.speedLoopKp = 0.01;
pUserInputRegs->systemParams.speedLoopKi = 0.05;
pUserInputRegs->systemParams.currLoopKp = 1;
pUserInputRegs->systemParams.currLoopKi = 500;
pUserInputRegs->systemParams.maxMotorSpeed = 1266; //4*19000/60 RPM
pUserInputRegs->systemParams.fluxWeakeningKp = 1.0;
pUserInputRegs->systemParams.fluxWeakeningKi = 500;
pUserInputRegs->systemParams.maxMotorPower = 10;
i change speedCtrl to 400.

it can run as below.
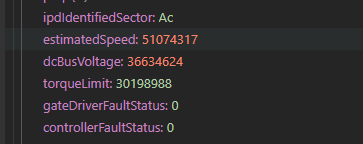
waveform is as below.

questions:
I want to run the motor at very low speed and high accuracy. but it can only run when I set >400.
any idea?
BR,
frank