Part Number: AM2431
Hi,
We would like to add 3 features to TI SDK's source/networking/enet/core/examples/tsn/gptp_cpsw_app example for our project:
First, configure CPTS module to generate periodic GENF (CPTS_GENF0) signal (say 40kHz).
As dipicted in Technical Reference Manual, Figure 10-56. SoC Time Sync Architecture:
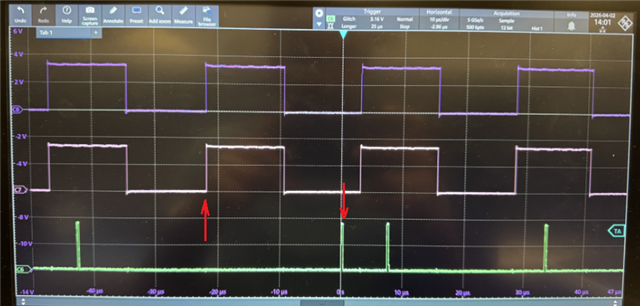
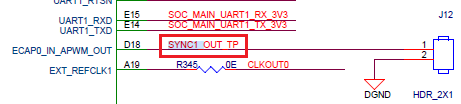
Second, configure Time Sync Router to output the CPTS_GENF0 to SYNC0_OUT, which can be routed to SYNC1_OUT_TP on AM243x EVM.
Third, connect to an interrupt handler that is triggered at the start of a CPTS_GENF0 period.
I think we know how to do generate the 40kHz CPTS_GENF0 signal. However, how to route CPTS_GENF0 to SYNC0_OUT and how to connect to interrupt handler seems to quite complex and no examples documented.
Can anyone in E2E please help with these?
We are using AM243x EVM and TI MCU plus SDK 11.01.00.17.
Thank you in advance!