Part Number: TIDA-010979
Hi Experts,
We have TIDA-010979 preliminary software released on 6 April including motor control and EtherCAT running on both cores.
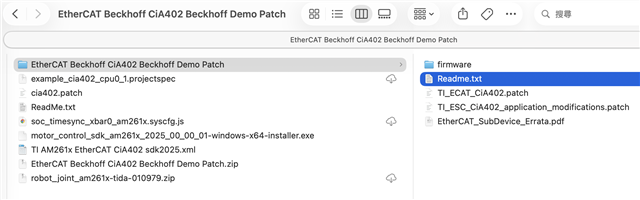
The files and subfolders are shown as below where there is a ReadMe.txt describing overall bring up procedures. Some problems listed as below need your help. Thanks in advance for your great support.

Q1: In the ReadMe.txt as below snapshot, the motor control SDK is Windows version(*.exe) provided in the release. Could we install it in Windows and copy all files in SDK in Ubuntu OS? It's preferred for us to use Ubuntu environment. And could we use TI CCS 20.5 version instead of 12.8 mentioned in .ccsproject of robot_joint_am261x-tida-010979_system project?

Q2: In step 3, does 'Apply patch in EtherCAT Beckhoff CiA402 Beckhoff Demo Patch' mean we have to follow another Readme.txt under this sub-folder to apply TI_ECAT_CiA402.patch and TI_ESC_CiA402_application_modications.patch and rebuild EtherCAT firmware HAL libraries? If yes, after applying TI_ECAT_CiA402.patch (ecat_frame_handler_bin.h and ecat_host_interface_bin.h are both patched here), the step 3-1 mentions to overwrite them. Is it correct to do it?

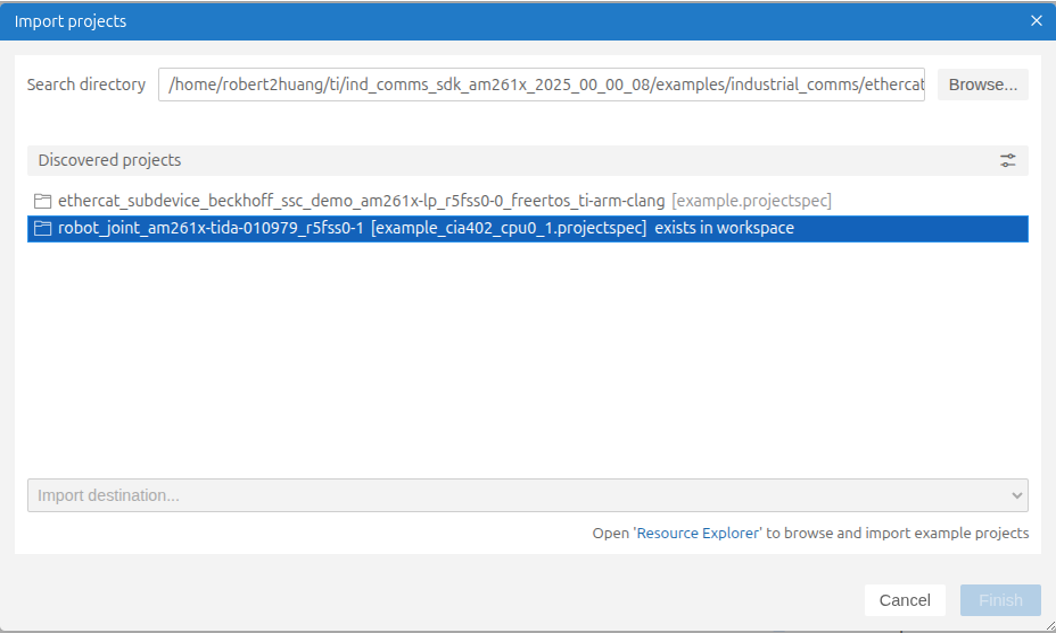
Q3: Continuing Q2, after applying patch of TI_ESC_CiA402_application_modifications.patch, example.projectspec file is modified. Afterwards when we import this Beckhoff demo example project, it shows up two *.projectspec as below snapshot. It's supposed to select example_cia402_cpu0_1_projectspec. But actually example.projectspec does some patches. Any reason for this? Or we misunderstand something?
Q4: For step 6, we faced problem when patching cia402.patch as below snapshot. Could you please provide some suggestions on these errors?

Q5: After importing 3 projects and we build the system project, the other two projects (r5ss0-*) do not build automatically. Any solution for this problem in CCS 20.5?
Q6: The build configurations for r5ss0-0 are LAUNCHPAD and TIDA_010979; the ones for r5ss0-1 are Debug and Release. In system project, one problme we faced during build is that it cannot find debug/r5fss0-0.out. Is there fast way to set up different build configuration for 2 sub projects in CCS 20.5 instead of modifying makefile_system_ccs_bootimage_gen file?
Best Regards,
Robert Huang