


Other Parts Discussed in Thread: MOTORWARE
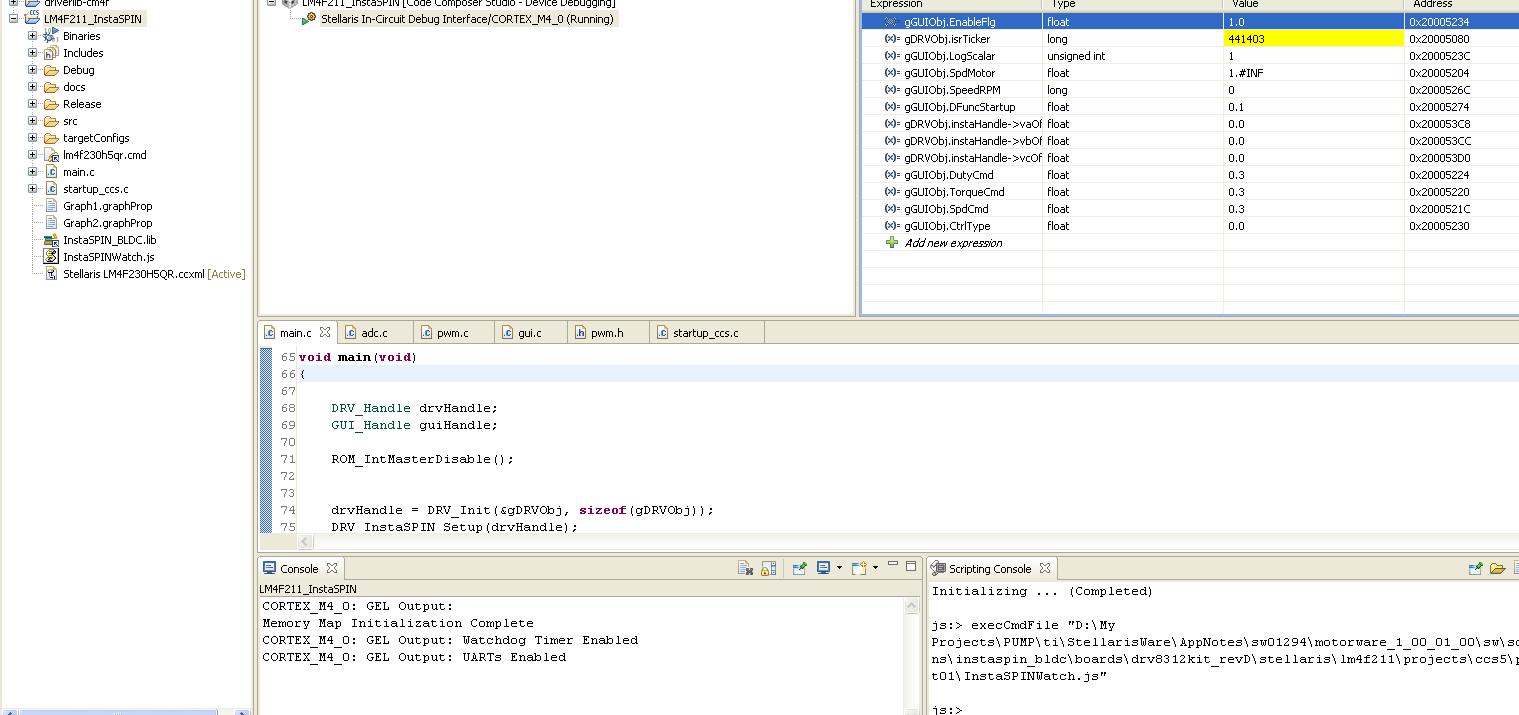
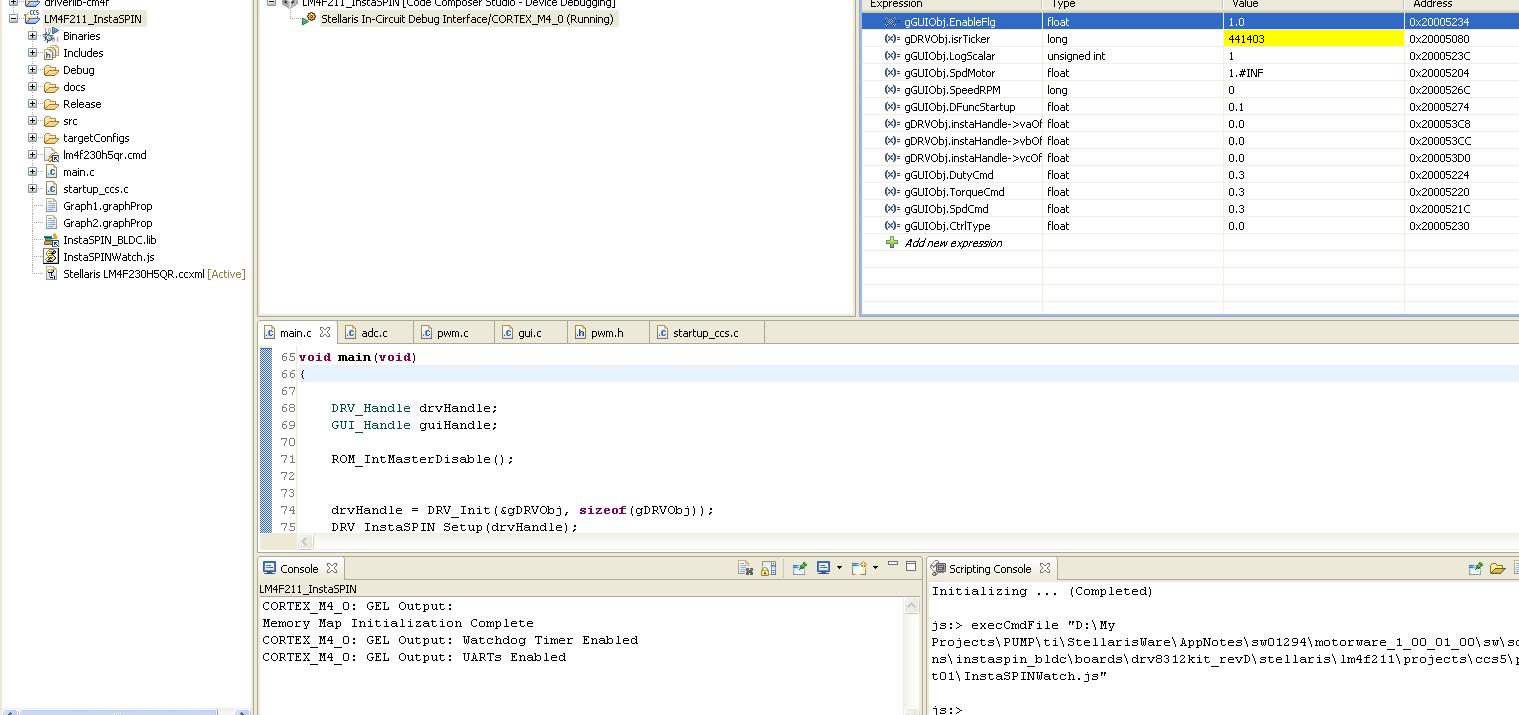
I work with kit DK-LM4F-DRV9312 and use an application "InstaSPIN™-BLDC Sensor less control for the Stellaris LM4F2x" Version 1.0.2. The CCSv5 was downloaded, installed, and i running.Then the InstaSPIN project was imported.I build program in DEBUG mode, launched a debug session to load the code into the controller. The Stellaris LM4F2x device was connected. The InstaSPINWatch.js script was loaded too. After press the Run button program is running, but the motor is not spin. The variable "gDRVObj.isrTicker" is changing (interrupts works). I set the “gGUIObj.EnableFlg” to 1, but motor is not spin.
"gGUIObj.SpdMotor" floats 1. #INF 0x20005204
See screenshot:
With "launcher.exe" as described in "DK-LM4F-DRV8312 READ ME FIRST" I successfully operated the motor using the GUI.
What is the problem of running debugging code to spin the motor?


{kind=link}