

Other Parts Discussed in Thread: TM4C123GH6PM
i had been trying to complete the lab 14 of the TM4C123G LaunchPad Workshop for sometimes but I am not able to compile it. I receive errors I find difficult to understand.
my part is TM4C123GH6PM and I am using TIVA Ware TivaWare_C_Series-2.1.0.12573 with CCS Version: 6.0.0.00190 .
#include "stdint.h"
#include "stdbool.h"
#include "inc/hw_memmap.h"
#include "inc/hw_ints.h"
#include "driverlib/debug.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom.h"
#include "driverlib/sysctl.h"
#include "sensorlib/hw_isl29023.h"
#include "sensorlib/i2cm_drv.h"
#include "sensorlib/isl29023.h"
#define DEBUG
#define ISL29023_I2C_ADDRESS 0x44 // ISL29023 I2C address
tI2CMInstance g_sI2CInst; // I2C master driver structure
tISL29023 g_sISL29023Inst; // ISL29023 sensor driver structure
volatile unsigned long g_vui8DataFlag; // Data ready flag
volatile unsigned long g_vui8ErrorFlag; // Error flag
//*************************************************************************
void
ISL29023AppCallback(void *pvCallbackData, uint_fast8_t ui8Status)
{
if(ui8Status == I2CM_STATUS_SUCCESS)
{
g_vui8DataFlag = 1;
}
g_vui8ErrorFlag = ui8Status;
}
//*************************************************************************
//*************************************************************************
void
ISL29023I2CIntHandler(void)
{
I2CMIntHandler(&g_sI2CInst);
}
//*************************************************************************
//*************************************************************************
void
ISL29023AppErrorHandler(char *pcFilename, uint_fast32_t ui32Line)
{
while(1)
{
}
}
//*************************************************************************
//*************************************************************************
void
ISL29023AppI2CWait(char *pcFilename, uint_fast32_t ui32Line)
{
while((g_vui8DataFlag == 0) && (g_vui8ErrorFlag == 0))
{
}
if(g_vui8ErrorFlag)
{
ISL29023AppErrorHandler(pcFilename, ui32Line);
}
g_vui8DataFlag = 0;
}
//*************************************************************************
//*************************************************************************
int
main(void)
{
float fAmbient;
uint8_t ui8Mask;
ROM_SysCtlClockSet(SYSCTL_SYSDIV_5|SYSCTL_USE_PLL|SYSCTL_XTAL_16MHZ|SYSCTL_OSC_MAIN);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C3);
ROM_GPIOPinConfigure(GPIO_PD0_I2C3SCL);
ROM_GPIOPinConfigure(GPIO_PD1_I2C3SDA);
GPIOPinTypeI2CSCL(GPIO_PORTD_BASE, GPIO_PIN_0);
ROM_GPIOPinTypeI2C(GPIO_PORTD_BASE, GPIO_PIN_1);
ROM_IntMasterEnable();
I2CMInit(&g_sI2CInst, I2C3_BASE, INT_I2C3, 0xFF, 0xFF, ROM_SysCtlClockGet());
SysCtlDelay(SysCtlClockGet() / 3);
ISL29023Init(&g_sISL29023Inst, &g_sI2CInst,
ISL29023_I2C_ADDRESS,ISL29023AppCallback, &g_sISL29023Inst);
ISL29023AppI2CWait(__FILE__, __LINE__);
ui8Mask = (ISL29023_CMD_I_OP_MODE_M );
ISL29023ReadModifyWrite(&g_sISL29023Inst, ISL29023_O_CMD_I, ~ui8Mask,
(ISL29023_CMD_I_OP_MODE_ALS_CONT),
ISL29023AppCallback, &g_sISL29023Inst);
ISL29023AppI2CWait(__FILE__, __LINE__);
while(1)
{
ISL29023DataRead(&g_sISL29023Inst, ISL29023AppCallback, &g_sISL29023Inst);
ISL29023AppI2CWait(__FILE__, __LINE__);
ISL29023DataLightVisibleGetFloat(&g_sISL29023Inst, &fAmbient);
}
}
//*****************************************************************************
//
// startup_ccs.c - Startup code for use with TI's Code Composer Studio.
//
// Copyright (c) 2013 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 1.0 of the EK-TM4C123GXL Firmware Package.
//
//*****************************************************************************
#include <stdint.h>
#include "inc/hw_nvic.h"
#include "inc/hw_types.h"
//*****************************************************************************
//
// Forward declaration of the default fault handlers.
//
//*****************************************************************************
void ResetISR(void);
static void NmiSR(void);
static void FaultISR(void);
static void IntDefaultHandler(void);
//*****************************************************************************
//
// External declaration for the reset handler that is to be called when the
// processor is started
//
//*****************************************************************************
extern void _c_int00(void);
//*****************************************************************************
//
// Linker variable that marks the top of the stack.
//
//*****************************************************************************
extern uint32_t __STACK_TOP;
//*****************************************************************************
//
// External declarations for the interrupt handlers used by the application.
//
//*****************************************************************************
//extern void IntGPIOe(void);
extern void ISL29023I2CIntHandler(void);
//extern void SysTickIntHandler(void);
//extern void UARTStdioIntHandler(void);
//extern void RGBBlinkIntHandler(void);
//*****************************************************************************
//
// The vector table. Note that the proper constructs must be placed on this to
// ensure that it ends up at physical address 0x0000.0000 or at the start of
// the program if located at a start address other than 0.
//
//*****************************************************************************
#pragma DATA_SECTION(g_pfnVectors, ".intvecs")
void (* const g_pfnVectors[])(void) =
{
(void (*)(void))((uint32_t)&__STACK_TOP),
// The initial stack pointer
ResetISR, // The reset handler
NmiSR, // The NMI handler
FaultISR, // The hard fault handler
IntDefaultHandler, // The MPU fault handler
IntDefaultHandler, // The bus fault handler
IntDefaultHandler, // The usage fault handler
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
IntDefaultHandler, // SVCall handler
IntDefaultHandler, // Debug monitor handler
0, // Reserved
IntDefaultHandler, // The PendSV handler
IntDefaultHandler, // The SysTick handler
IntDefaultHandler, // GPIO Port A
IntDefaultHandler, // GPIO Port B
IntDefaultHandler, // GPIO Port C
IntDefaultHandler, // GPIO Port D
IntDefaultHandler, // GPIO Port E
IntDefaultHandler, // UART0 Rx and Tx
IntDefaultHandler, // UART1 Rx and Tx
IntDefaultHandler, // SSI0 Rx and Tx
IntDefaultHandler, // I2C0 Master and Slave
IntDefaultHandler, // PWM Fault
IntDefaultHandler, // PWM Generator 0
IntDefaultHandler, // PWM Generator 1
IntDefaultHandler, // PWM Generator 2
IntDefaultHandler, // Quadrature Encoder 0
IntDefaultHandler, // ADC Sequence 0
IntDefaultHandler, // ADC Sequence 1
IntDefaultHandler, // ADC Sequence 2
IntDefaultHandler, // ADC Sequence 3
IntDefaultHandler, // Watchdog timer
IntDefaultHandler, // Timer 0 subtimer A
IntDefaultHandler, // Timer 0 subtimer B
IntDefaultHandler, // Timer 1 subtimer A
IntDefaultHandler, // Timer 1 subtimer B
IntDefaultHandler, // Timer 2 subtimer A
IntDefaultHandler, // Timer 2 subtimer B
IntDefaultHandler, // Analog Comparator 0
IntDefaultHandler, // Analog Comparator 1
IntDefaultHandler, // Analog Comparator 2
IntDefaultHandler, // System Control (PLL, OSC, BO)
IntDefaultHandler, // FLASH Control
IntDefaultHandler, // GPIO Port F
IntDefaultHandler, // GPIO Port G
IntDefaultHandler, // GPIO Port H
IntDefaultHandler, // UART2 Rx and Tx
IntDefaultHandler, // SSI1 Rx and Tx
IntDefaultHandler, // Timer 3 subtimer A
IntDefaultHandler, // Timer 3 subtimer B
IntDefaultHandler, // I2C1 Master and Slave
IntDefaultHandler, // Quadrature Encoder 1
IntDefaultHandler, // CAN0
IntDefaultHandler, // CAN1
IntDefaultHandler, // CAN2
0, // Reserved
IntDefaultHandler, // Hibernate
IntDefaultHandler, // USB0
IntDefaultHandler, // PWM Generator 3
IntDefaultHandler, // uDMA Software Transfer
IntDefaultHandler, // uDMA Error
IntDefaultHandler, // ADC1 Sequence 0
IntDefaultHandler, // ADC1 Sequence 1
IntDefaultHandler, // ADC1 Sequence 2
IntDefaultHandler, // ADC1 Sequence 3
0, // Reserved
0, // Reserved
IntDefaultHandler, // GPIO Port J
IntDefaultHandler, // GPIO Port K
IntDefaultHandler, // GPIO Port L
IntDefaultHandler, // SSI2 Rx and Tx
IntDefaultHandler, // SSI3 Rx and Tx
IntDefaultHandler, // UART3 Rx and Tx
IntDefaultHandler, // UART4 Rx and Tx
IntDefaultHandler, // UART5 Rx and Tx
IntDefaultHandler, // UART6 Rx and Tx
IntDefaultHandler, // UART7 Rx and Tx
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
IntDefaultHandler, // I2C2 Master and Slave
ISL29023I2CIntHandler, // I2C3 Master and Slave
IntDefaultHandler, // Timer 4 subtimer A
IntDefaultHandler, // Timer 4 subtimer B
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
IntDefaultHandler, // Timer 5 subtimer A
IntDefaultHandler, // Timer 5 subtimer B
IntDefaultHandler, // Wide Timer 0 subtimer A
IntDefaultHandler, // Wide Timer 0 subtimer B
IntDefaultHandler, // Wide Timer 1 subtimer A
IntDefaultHandler, // Wide Timer 1 subtimer B
IntDefaultHandler, // Wide Timer 2 subtimer A
IntDefaultHandler, // Wide Timer 2 subtimer B
IntDefaultHandler, // Wide Timer 3 subtimer A
IntDefaultHandler, // Wide Timer 3 subtimer B
IntDefaultHandler, // Wide Timer 4 subtimer A
IntDefaultHandler, // Wide Timer 4 subtimer B
IntDefaultHandler, // Wide Timer 5 subtimer A
IntDefaultHandler, // Wide Timer 5 subtimer B
IntDefaultHandler, // FPU
0, // Reserved
0, // Reserved
IntDefaultHandler, // I2C4 Master and Slave
IntDefaultHandler, // I2C5 Master and Slave
IntDefaultHandler, // GPIO Port M
IntDefaultHandler, // GPIO Port N
IntDefaultHandler, // Quadrature Encoder 2
0, // Reserved
0, // Reserved
IntDefaultHandler, // GPIO Port P (Summary or P0)
IntDefaultHandler, // GPIO Port P1
IntDefaultHandler, // GPIO Port P2
IntDefaultHandler, // GPIO Port P3
IntDefaultHandler, // GPIO Port P4
IntDefaultHandler, // GPIO Port P5
IntDefaultHandler, // GPIO Port P6
IntDefaultHandler, // GPIO Port P7
IntDefaultHandler, // GPIO Port Q (Summary or Q0)
IntDefaultHandler, // GPIO Port Q1
IntDefaultHandler, // GPIO Port Q2
IntDefaultHandler, // GPIO Port Q3
IntDefaultHandler, // GPIO Port Q4
IntDefaultHandler, // GPIO Port Q5
IntDefaultHandler, // GPIO Port Q6
IntDefaultHandler, // GPIO Port Q7
IntDefaultHandler, // GPIO Port R
IntDefaultHandler, // GPIO Port S
IntDefaultHandler, // PWM 1 Generator 0
IntDefaultHandler, // PWM 1 Generator 1
IntDefaultHandler, // PWM 1 Generator 2
IntDefaultHandler, // PWM 1 Generator 3
IntDefaultHandler // PWM 1 Fault
};
//*****************************************************************************
//
// This is the code that gets called when the processor first starts execution
// following a reset event. Only the absolutely necessary set is performed,
// after which the application supplied entry() routine is called. Any fancy
// actions (such as making decisions based on the reset cause register, and
// resetting the bits in that register) are left solely in the hands of the
// application.
//
//*****************************************************************************
void
ResetISR(void)
{
//
// Jump to the CCS C initialization routine. This will enable the
// floating-point unit as well, so that does not need to be done here.
//
__asm(" .global _c_int00\n"
" b.w _c_int00");
}
//*****************************************************************************
//
// This is the code that gets called when the processor receives a NMI. This
// simply enters an infinite loop, preserving the system state for examination
// by a debugger.
//
//*****************************************************************************
static void
NmiSR(void)
{
//
// Enter an infinite loop.
//
while(1)
{
}
}
//*****************************************************************************
//
// This is the code that gets called when the processor receives a fault
// interrupt. This simply enters an infinite loop, preserving the system state
// for examination by a debugger.
//
//*****************************************************************************
static void
FaultISR(void)
{
//
// Enter an infinite loop.
//
while(1)
{
}
}
//*****************************************************************************
//
// This is the code that gets called when the processor receives an unexpected
// interrupt. This simply enters an infinite loop, preserving the system state
// for examination by a debugger.
//
//*****************************************************************************
static void
IntDefaultHandler(void)
{
//
// Go into an infinite loop.
//
while(1)
{
}
}
the following code is straight from the lab files.
main.c code
#include "stdint.h"
#include "stdbool.h"
#include "inc/hw_memmap.h"
#include "inc/hw_ints.h"
#include "driverlib/debug.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom.h"
#include "driverlib/sysctl.h"
#include "sensorlib/hw_isl29023.h"
#include "sensorlib/i2cm_drv.h"
#include "sensorlib/isl29023.h"
#define DEBUG
#define ISL29023_I2C_ADDRESS 0x44 // ISL29023 I2C address
tI2CMInstance g_sI2CInst; // I2C master driver structure
tISL29023 g_sISL29023Inst; // ISL29023 sensor driver structure
volatile unsigned long g_vui8DataFlag; // Data ready flag
volatile unsigned long g_vui8ErrorFlag; // Error flag
//*************************************************************************
void
ISL29023AppCallback(void *pvCallbackData, uint_fast8_t ui8Status)
{
if(ui8Status == I2CM_STATUS_SUCCESS)
{
g_vui8DataFlag = 1;
}
g_vui8ErrorFlag = ui8Status;
}
//*************************************************************************
//*************************************************************************
void
ISL29023I2CIntHandler(void)
{
I2CMIntHandler(&g_sI2CInst);
}
//*************************************************************************
//*************************************************************************
void
ISL29023AppErrorHandler(char *pcFilename, uint_fast32_t ui32Line)
{
while(1)
{
}
}
//*************************************************************************
//*************************************************************************
void
ISL29023AppI2CWait(char *pcFilename, uint_fast32_t ui32Line)
{
while((g_vui8DataFlag == 0) && (g_vui8ErrorFlag == 0))
{
}
if(g_vui8ErrorFlag)
{
ISL29023AppErrorHandler(pcFilename, ui32Line);
}
g_vui8DataFlag = 0;
}
//*************************************************************************
//*************************************************************************
int
main(void)
{
float fAmbient;
uint8_t ui8Mask;
ROM_SysCtlClockSet(SYSCTL_SYSDIV_5|SYSCTL_USE_PLL|SYSCTL_XTAL_16MHZ|SYSCTL_OSC_MAIN);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C3);
ROM_GPIOPinConfigure(GPIO_PD0_I2C3SCL);
ROM_GPIOPinConfigure(GPIO_PD1_I2C3SDA);
GPIOPinTypeI2CSCL(GPIO_PORTD_BASE, GPIO_PIN_0);
ROM_GPIOPinTypeI2C(GPIO_PORTD_BASE, GPIO_PIN_1);
ROM_IntMasterEnable();
I2CMInit(&g_sI2CInst, I2C3_BASE, INT_I2C3, 0xFF, 0xFF, ROM_SysCtlClockGet());
SysCtlDelay(SysCtlClockGet() / 3);
ISL29023Init(&g_sISL29023Inst, &g_sI2CInst,
ISL29023_I2C_ADDRESS,ISL29023AppCallback, &g_sISL29023Inst);
ISL29023AppI2CWait(__FILE__, __LINE__);
ui8Mask = (ISL29023_CMD_I_OP_MODE_M );
ISL29023ReadModifyWrite(&g_sISL29023Inst, ISL29023_O_CMD_I, ~ui8Mask,
(ISL29023_CMD_I_OP_MODE_ALS_CONT),
ISL29023AppCallback, &g_sISL29023Inst);
ISL29023AppI2CWait(__FILE__, __LINE__);
while(1)
{
ISL29023DataRead(&g_sISL29023Inst, ISL29023AppCallback, &g_sISL29023Inst);
ISL29023AppI2CWait(__FILE__, __LINE__);
ISL29023DataLightVisibleGetFloat(&g_sISL29023Inst, &fAmbient);
}
}
startup_ccs.s code
//*****************************************************************************
//
// startup_ccs.c - Startup code for use with TI's Code Composer Studio.
//
// Copyright (c) 2013 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
// This is part of revision 1.0 of the EK-TM4C123GXL Firmware Package.
//
//*****************************************************************************
#include <stdint.h>
#include "inc/hw_nvic.h"
#include "inc/hw_types.h"
//*****************************************************************************
//
// Forward declaration of the default fault handlers.
//
//*****************************************************************************
void ResetISR(void);
static void NmiSR(void);
static void FaultISR(void);
static void IntDefaultHandler(void);
//*****************************************************************************
//
// External declaration for the reset handler that is to be called when the
// processor is started
//
//*****************************************************************************
extern void _c_int00(void);
//*****************************************************************************
//
// Linker variable that marks the top of the stack.
//
//*****************************************************************************
extern uint32_t __STACK_TOP;
//*****************************************************************************
//
// External declarations for the interrupt handlers used by the application.
//
//*****************************************************************************
//extern void IntGPIOe(void);
extern void ISL29023I2CIntHandler(void);
//extern void SysTickIntHandler(void);
//extern void UARTStdioIntHandler(void);
//extern void RGBBlinkIntHandler(void);
//*****************************************************************************
//
// The vector table. Note that the proper constructs must be placed on this to
// ensure that it ends up at physical address 0x0000.0000 or at the start of
// the program if located at a start address other than 0.
//
//*****************************************************************************
#pragma DATA_SECTION(g_pfnVectors, ".intvecs")
void (* const g_pfnVectors[])(void) =
{
(void (*)(void))((uint32_t)&__STACK_TOP),
// The initial stack pointer
ResetISR, // The reset handler
NmiSR, // The NMI handler
FaultISR, // The hard fault handler
IntDefaultHandler, // The MPU fault handler
IntDefaultHandler, // The bus fault handler
IntDefaultHandler, // The usage fault handler
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
IntDefaultHandler, // SVCall handler
IntDefaultHandler, // Debug monitor handler
0, // Reserved
IntDefaultHandler, // The PendSV handler
IntDefaultHandler, // The SysTick handler
IntDefaultHandler, // GPIO Port A
IntDefaultHandler, // GPIO Port B
IntDefaultHandler, // GPIO Port C
IntDefaultHandler, // GPIO Port D
IntDefaultHandler, // GPIO Port E
IntDefaultHandler, // UART0 Rx and Tx
IntDefaultHandler, // UART1 Rx and Tx
IntDefaultHandler, // SSI0 Rx and Tx
IntDefaultHandler, // I2C0 Master and Slave
IntDefaultHandler, // PWM Fault
IntDefaultHandler, // PWM Generator 0
IntDefaultHandler, // PWM Generator 1
IntDefaultHandler, // PWM Generator 2
IntDefaultHandler, // Quadrature Encoder 0
IntDefaultHandler, // ADC Sequence 0
IntDefaultHandler, // ADC Sequence 1
IntDefaultHandler, // ADC Sequence 2
IntDefaultHandler, // ADC Sequence 3
IntDefaultHandler, // Watchdog timer
IntDefaultHandler, // Timer 0 subtimer A
IntDefaultHandler, // Timer 0 subtimer B
IntDefaultHandler, // Timer 1 subtimer A
IntDefaultHandler, // Timer 1 subtimer B
IntDefaultHandler, // Timer 2 subtimer A
IntDefaultHandler, // Timer 2 subtimer B
IntDefaultHandler, // Analog Comparator 0
IntDefaultHandler, // Analog Comparator 1
IntDefaultHandler, // Analog Comparator 2
IntDefaultHandler, // System Control (PLL, OSC, BO)
IntDefaultHandler, // FLASH Control
IntDefaultHandler, // GPIO Port F
IntDefaultHandler, // GPIO Port G
IntDefaultHandler, // GPIO Port H
IntDefaultHandler, // UART2 Rx and Tx
IntDefaultHandler, // SSI1 Rx and Tx
IntDefaultHandler, // Timer 3 subtimer A
IntDefaultHandler, // Timer 3 subtimer B
IntDefaultHandler, // I2C1 Master and Slave
IntDefaultHandler, // Quadrature Encoder 1
IntDefaultHandler, // CAN0
IntDefaultHandler, // CAN1
IntDefaultHandler, // CAN2
0, // Reserved
IntDefaultHandler, // Hibernate
IntDefaultHandler, // USB0
IntDefaultHandler, // PWM Generator 3
IntDefaultHandler, // uDMA Software Transfer
IntDefaultHandler, // uDMA Error
IntDefaultHandler, // ADC1 Sequence 0
IntDefaultHandler, // ADC1 Sequence 1
IntDefaultHandler, // ADC1 Sequence 2
IntDefaultHandler, // ADC1 Sequence 3
0, // Reserved
0, // Reserved
IntDefaultHandler, // GPIO Port J
IntDefaultHandler, // GPIO Port K
IntDefaultHandler, // GPIO Port L
IntDefaultHandler, // SSI2 Rx and Tx
IntDefaultHandler, // SSI3 Rx and Tx
IntDefaultHandler, // UART3 Rx and Tx
IntDefaultHandler, // UART4 Rx and Tx
IntDefaultHandler, // UART5 Rx and Tx
IntDefaultHandler, // UART6 Rx and Tx
IntDefaultHandler, // UART7 Rx and Tx
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
IntDefaultHandler, // I2C2 Master and Slave
ISL29023I2CIntHandler, // I2C3 Master and Slave
IntDefaultHandler, // Timer 4 subtimer A
IntDefaultHandler, // Timer 4 subtimer B
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
0, // Reserved
IntDefaultHandler, // Timer 5 subtimer A
IntDefaultHandler, // Timer 5 subtimer B
IntDefaultHandler, // Wide Timer 0 subtimer A
IntDefaultHandler, // Wide Timer 0 subtimer B
IntDefaultHandler, // Wide Timer 1 subtimer A
IntDefaultHandler, // Wide Timer 1 subtimer B
IntDefaultHandler, // Wide Timer 2 subtimer A
IntDefaultHandler, // Wide Timer 2 subtimer B
IntDefaultHandler, // Wide Timer 3 subtimer A
IntDefaultHandler, // Wide Timer 3 subtimer B
IntDefaultHandler, // Wide Timer 4 subtimer A
IntDefaultHandler, // Wide Timer 4 subtimer B
IntDefaultHandler, // Wide Timer 5 subtimer A
IntDefaultHandler, // Wide Timer 5 subtimer B
IntDefaultHandler, // FPU
0, // Reserved
0, // Reserved
IntDefaultHandler, // I2C4 Master and Slave
IntDefaultHandler, // I2C5 Master and Slave
IntDefaultHandler, // GPIO Port M
IntDefaultHandler, // GPIO Port N
IntDefaultHandler, // Quadrature Encoder 2
0, // Reserved
0, // Reserved
IntDefaultHandler, // GPIO Port P (Summary or P0)
IntDefaultHandler, // GPIO Port P1
IntDefaultHandler, // GPIO Port P2
IntDefaultHandler, // GPIO Port P3
IntDefaultHandler, // GPIO Port P4
IntDefaultHandler, // GPIO Port P5
IntDefaultHandler, // GPIO Port P6
IntDefaultHandler, // GPIO Port P7
IntDefaultHandler, // GPIO Port Q (Summary or Q0)
IntDefaultHandler, // GPIO Port Q1
IntDefaultHandler, // GPIO Port Q2
IntDefaultHandler, // GPIO Port Q3
IntDefaultHandler, // GPIO Port Q4
IntDefaultHandler, // GPIO Port Q5
IntDefaultHandler, // GPIO Port Q6
IntDefaultHandler, // GPIO Port Q7
IntDefaultHandler, // GPIO Port R
IntDefaultHandler, // GPIO Port S
IntDefaultHandler, // PWM 1 Generator 0
IntDefaultHandler, // PWM 1 Generator 1
IntDefaultHandler, // PWM 1 Generator 2
IntDefaultHandler, // PWM 1 Generator 3
IntDefaultHandler // PWM 1 Fault
};
//*****************************************************************************
//
// This is the code that gets called when the processor first starts execution
// following a reset event. Only the absolutely necessary set is performed,
// after which the application supplied entry() routine is called. Any fancy
// actions (such as making decisions based on the reset cause register, and
// resetting the bits in that register) are left solely in the hands of the
// application.
//
//*****************************************************************************
void
ResetISR(void)
{
//
// Jump to the CCS C initialization routine. This will enable the
// floating-point unit as well, so that does not need to be done here.
//
__asm(" .global _c_int00\n"
" b.w _c_int00");
}
//*****************************************************************************
//
// This is the code that gets called when the processor receives a NMI. This
// simply enters an infinite loop, preserving the system state for examination
// by a debugger.
//
//*****************************************************************************
static void
NmiSR(void)
{
//
// Enter an infinite loop.
//
while(1)
{
}
}
//*****************************************************************************
//
// This is the code that gets called when the processor receives a fault
// interrupt. This simply enters an infinite loop, preserving the system state
// for examination by a debugger.
//
//*****************************************************************************
static void
FaultISR(void)
{
//
// Enter an infinite loop.
//
while(1)
{
}
}
//*****************************************************************************
//
// This is the code that gets called when the processor receives an unexpected
// interrupt. This simply enters an infinite loop, preserving the system state
// for examination by a debugger.
//
//*****************************************************************************
static void
IntDefaultHandler(void)
{
//
// Go into an infinite loop.
//
while(1)
{
}
}
Attached above are my main.c files content and the start up files content.
im trying my best to explain the scenario using the following images.



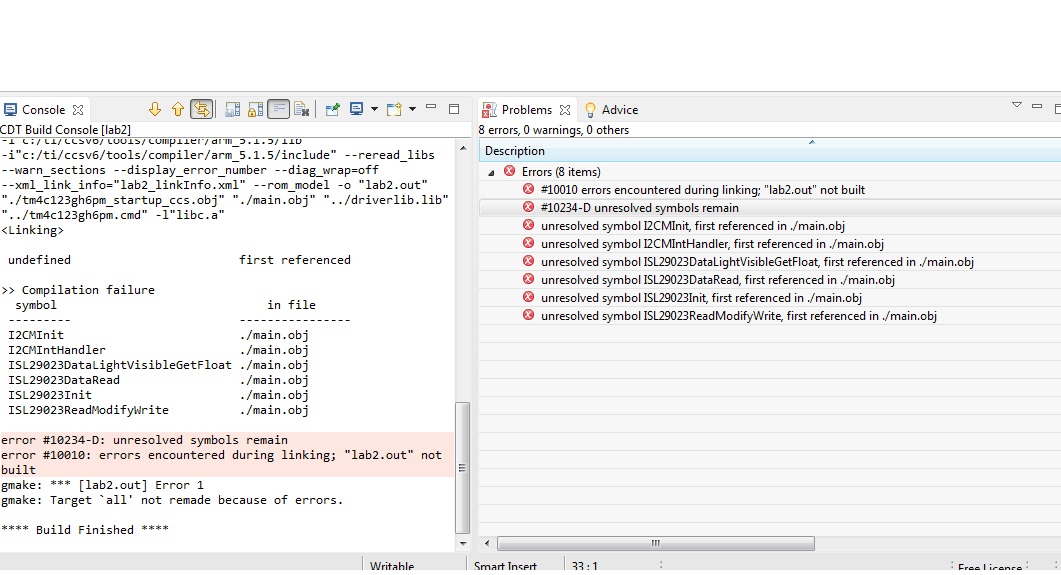

II would so much appreciate help in this matter.
thank you for all answers.
