Other Parts Discussed in Thread: SN65HVD1050, LMFLASHPROGRAMMER, EK-TM4C1294XL
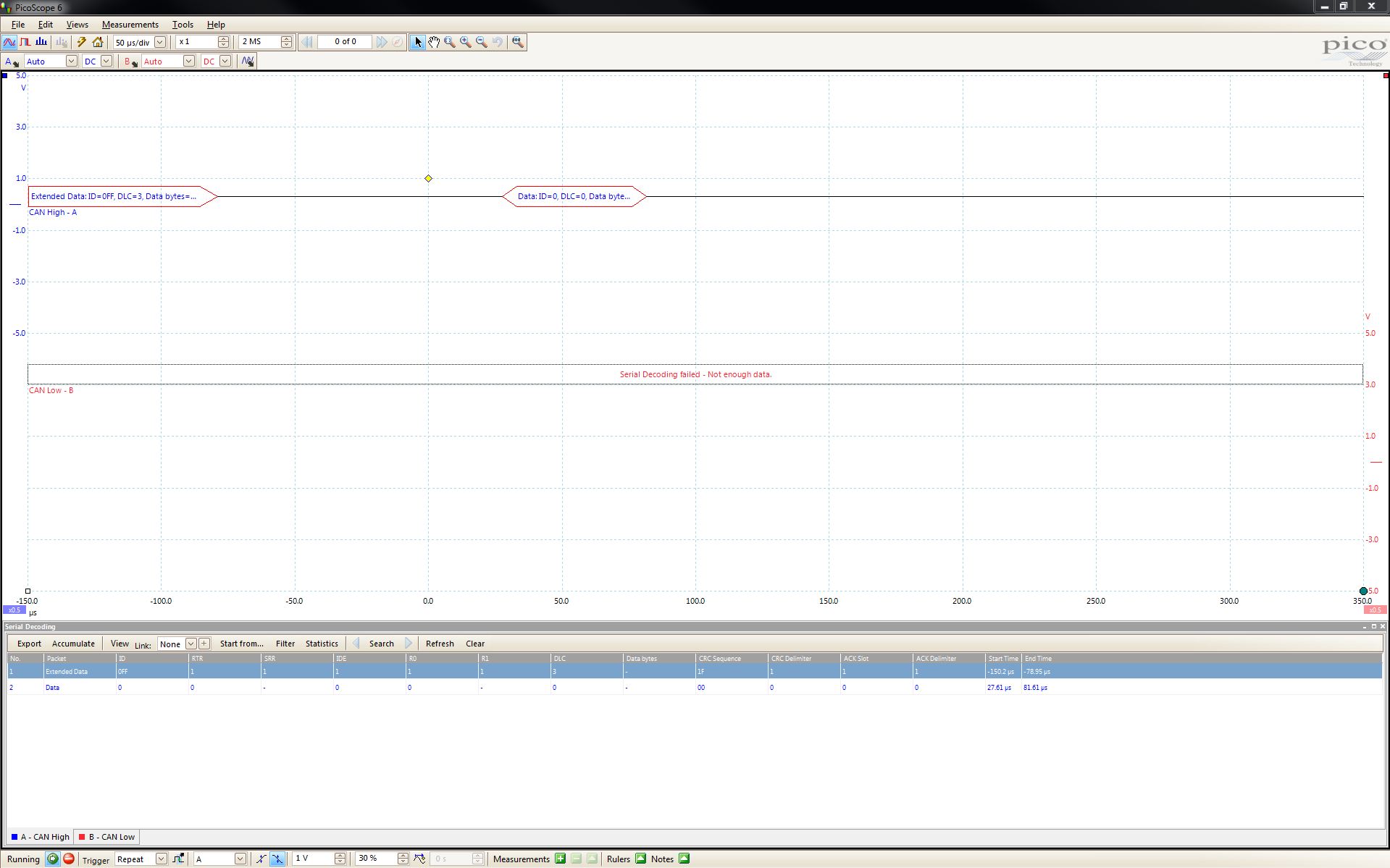
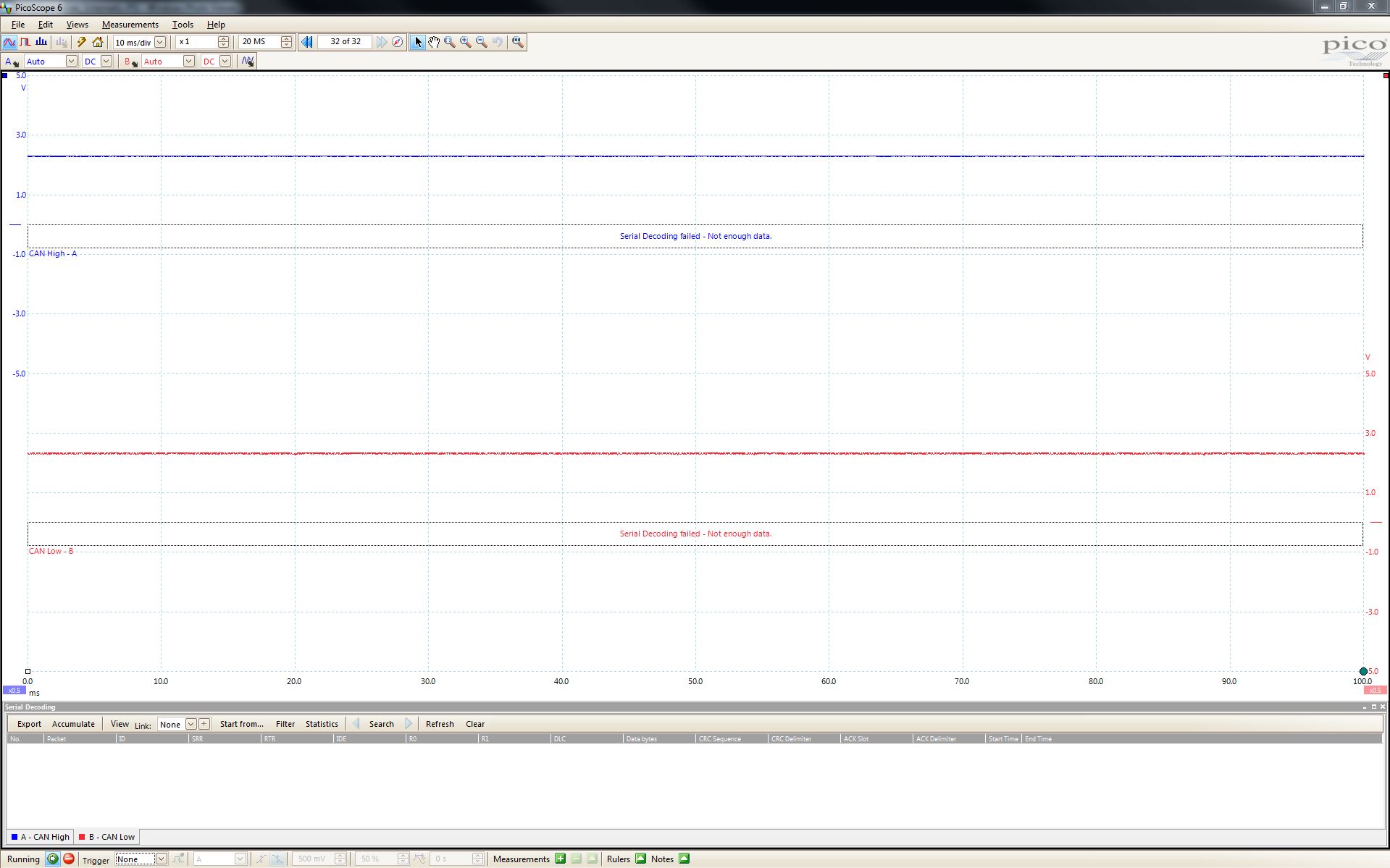
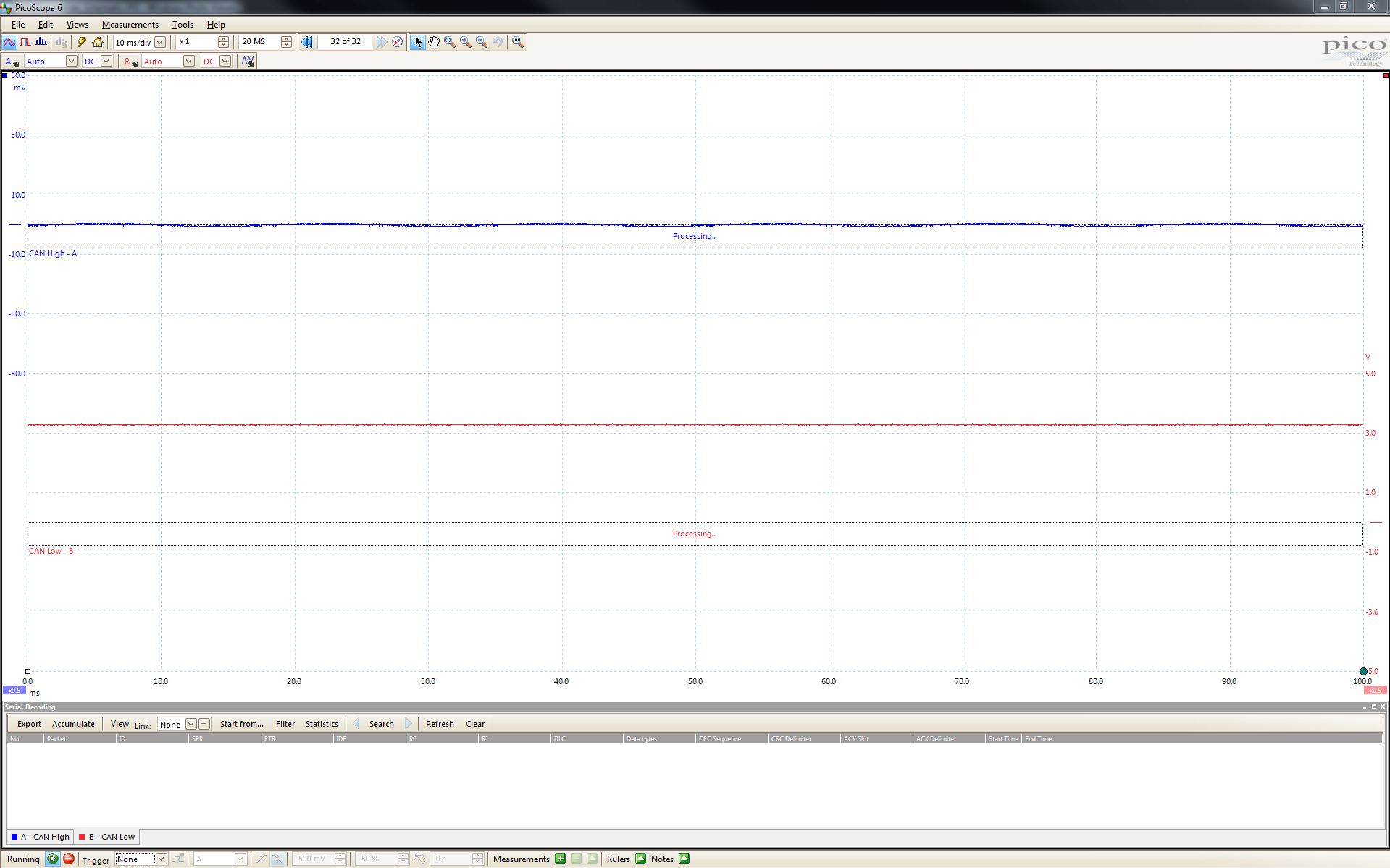
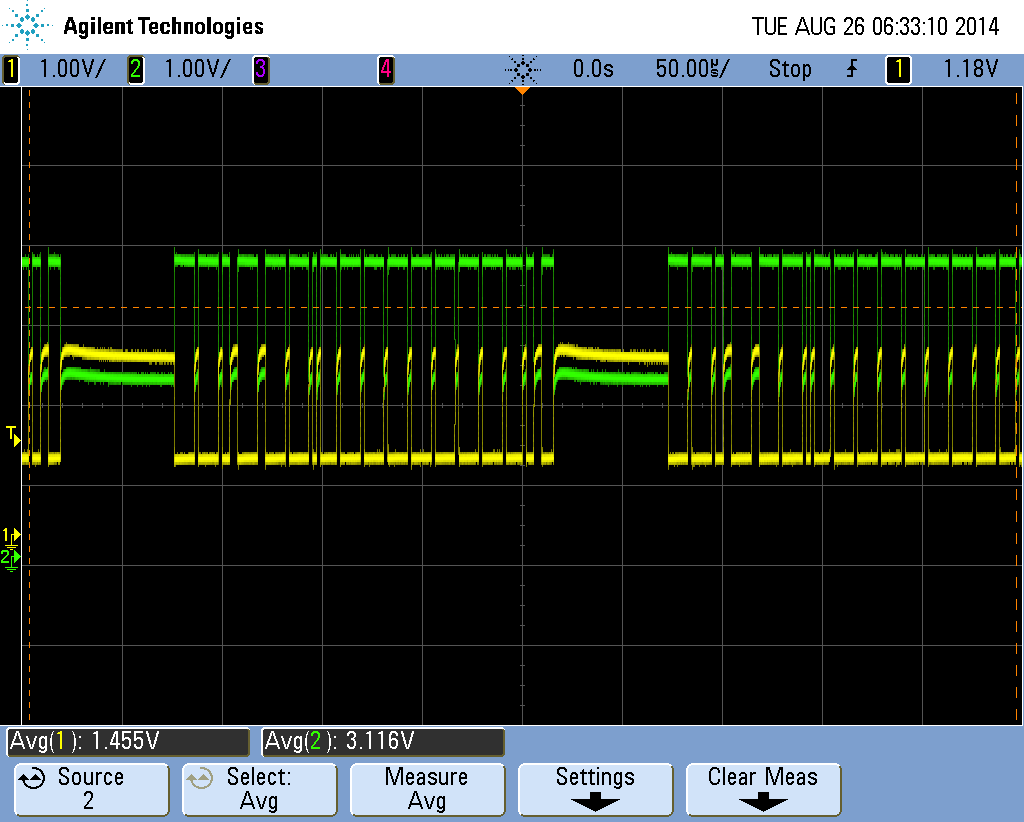
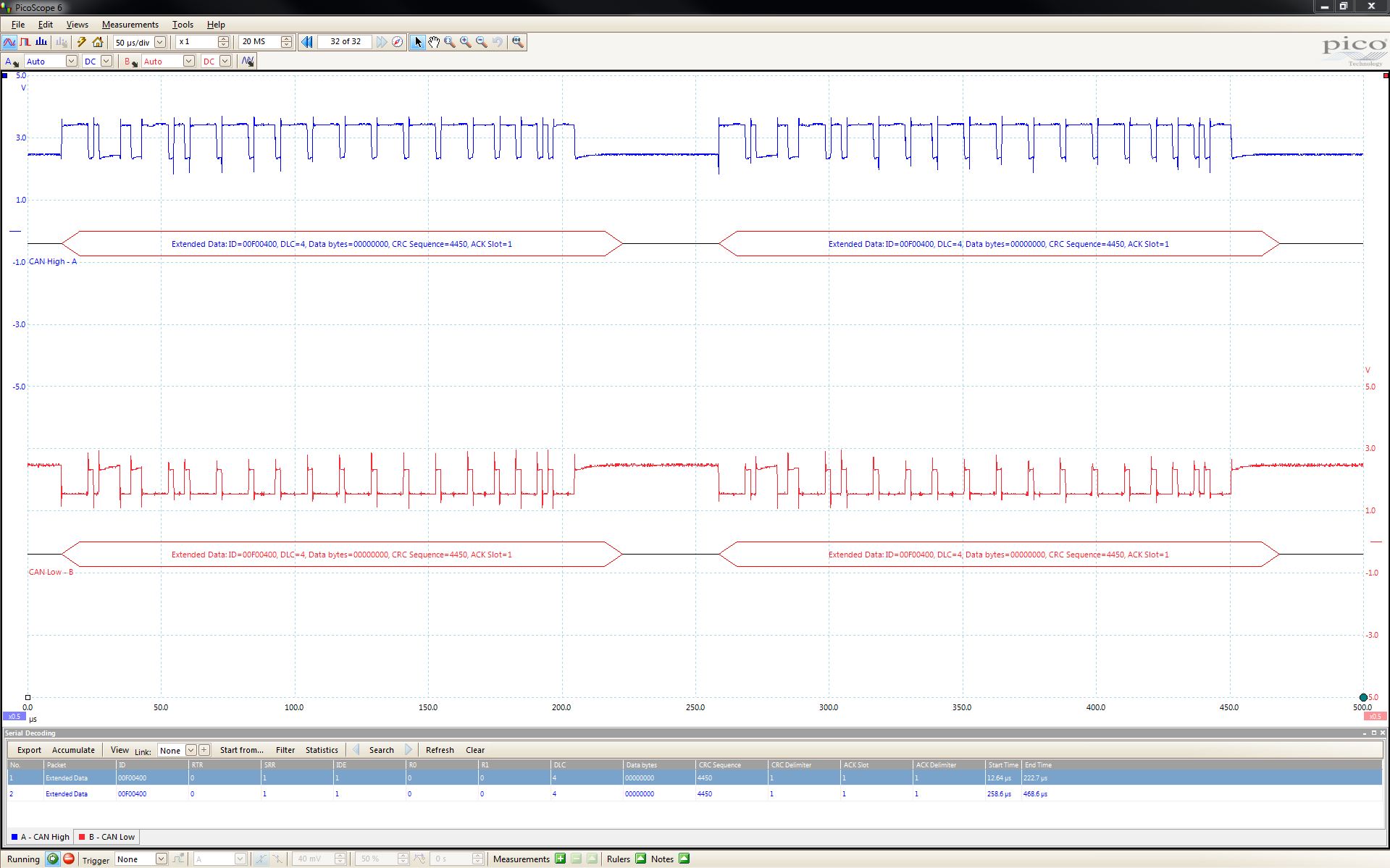
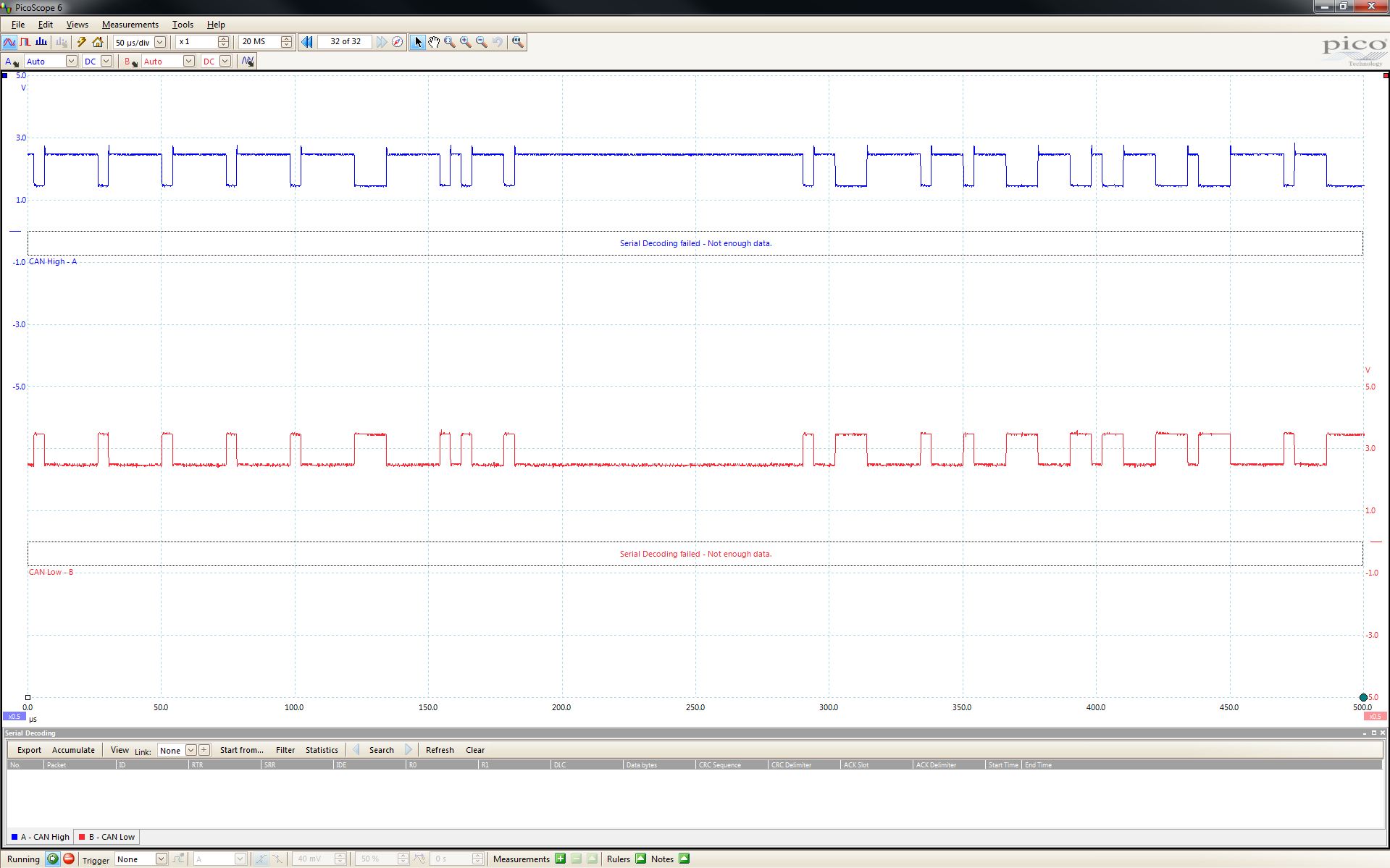
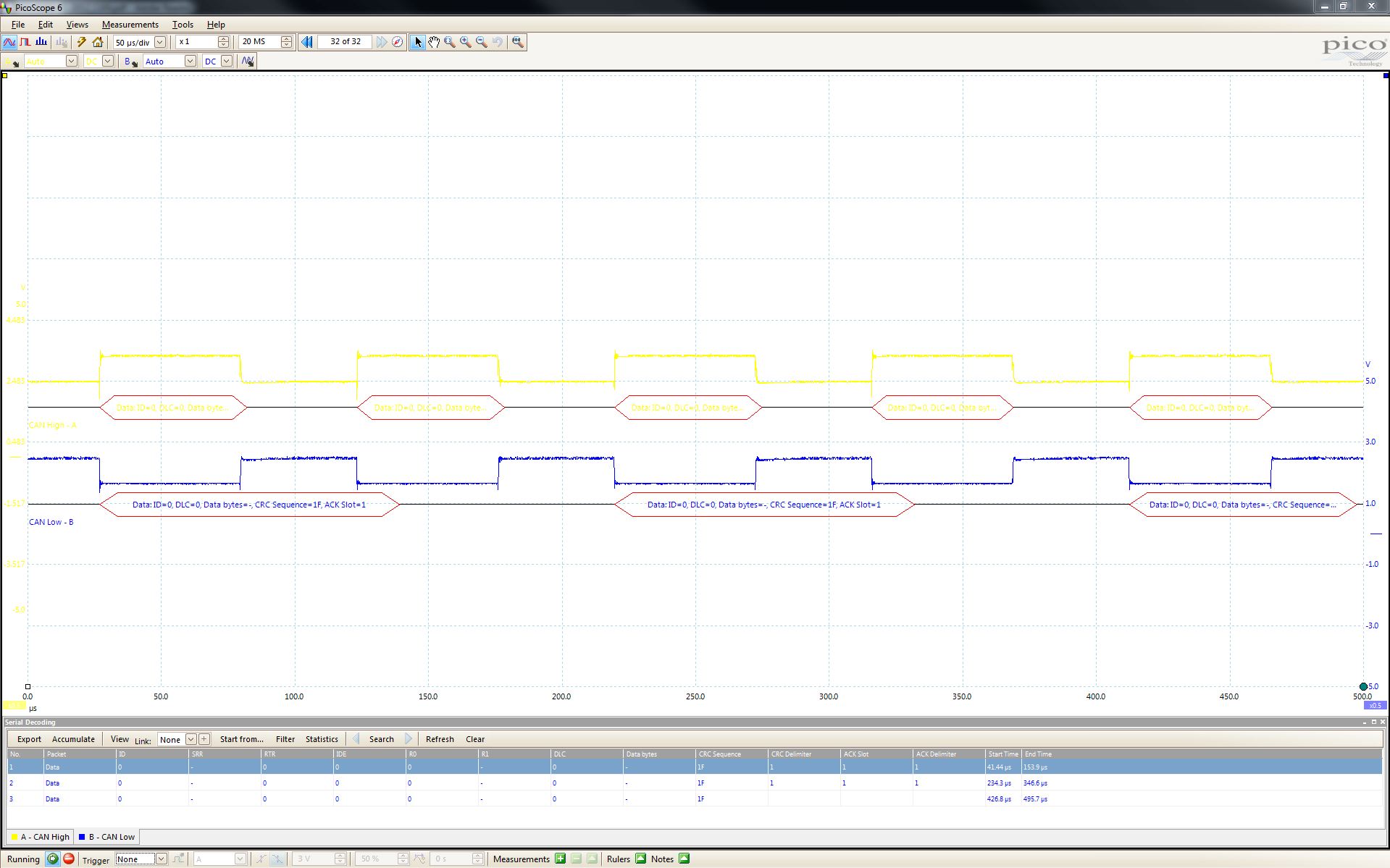
i am trying to set up a CAN bus and I am having trouble understanding what CAN tx and CAN rx represent in terms of hooking up a cable. I am used to CAN high and CAN low. Currently, I only have probes hooked up to the CAN tx (CAN Low - red) and CAN rx (CAN High - blue) and I am not sure if I am receiving data or not. Is this correct?