Hi,
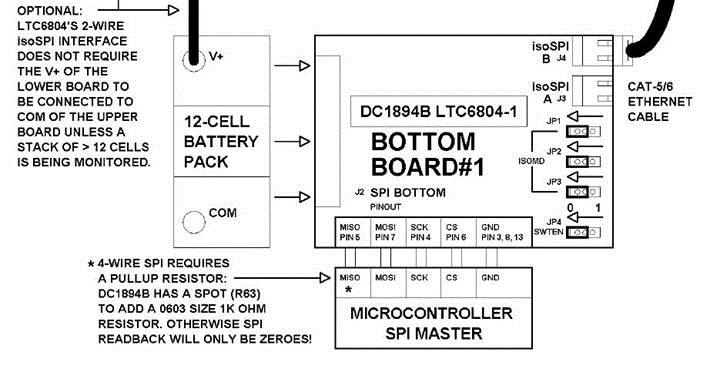
I'm sending 4 bytes and then receiving 8 bytes. The SSIfss is not used. I'm using a GPIO as CS.
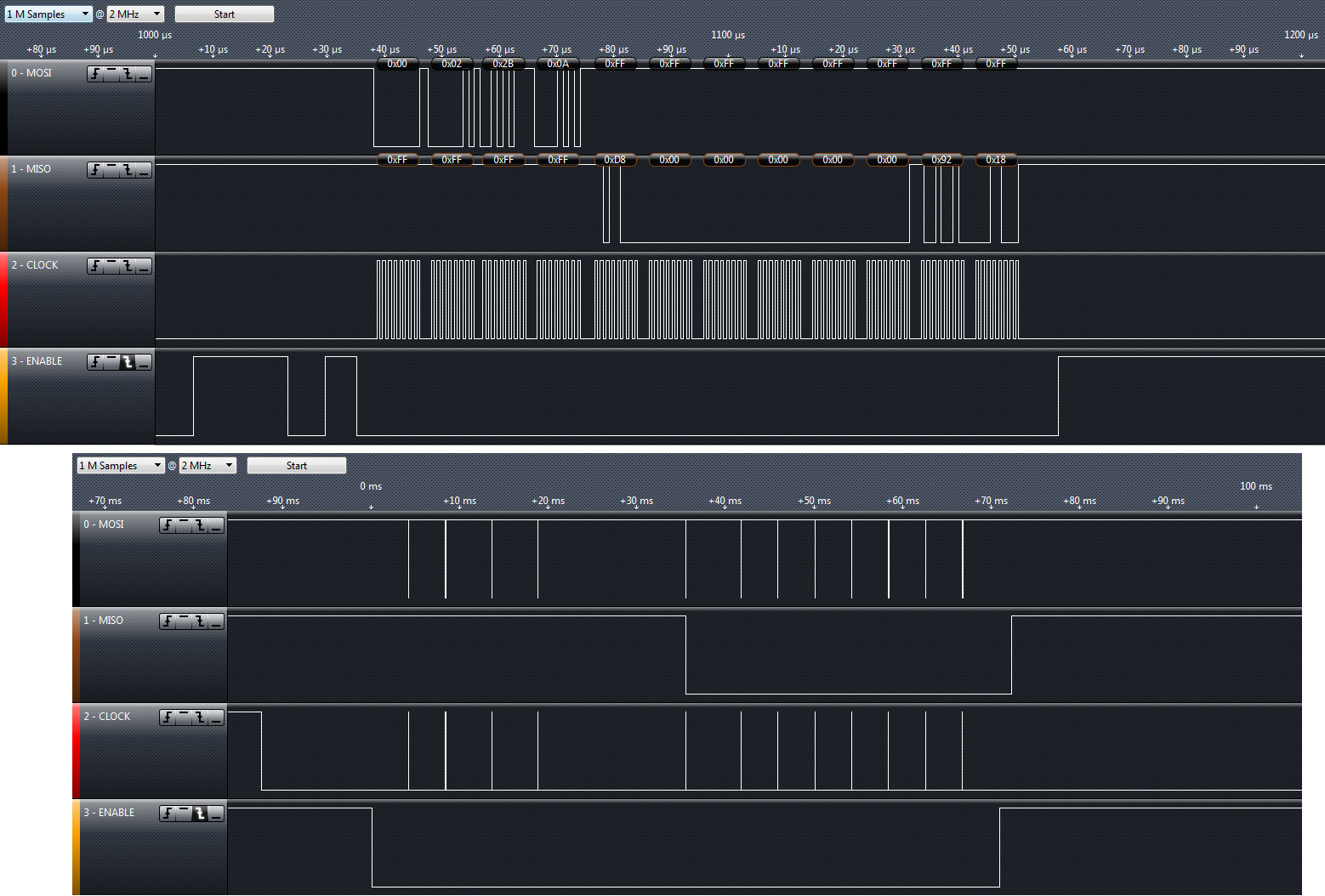
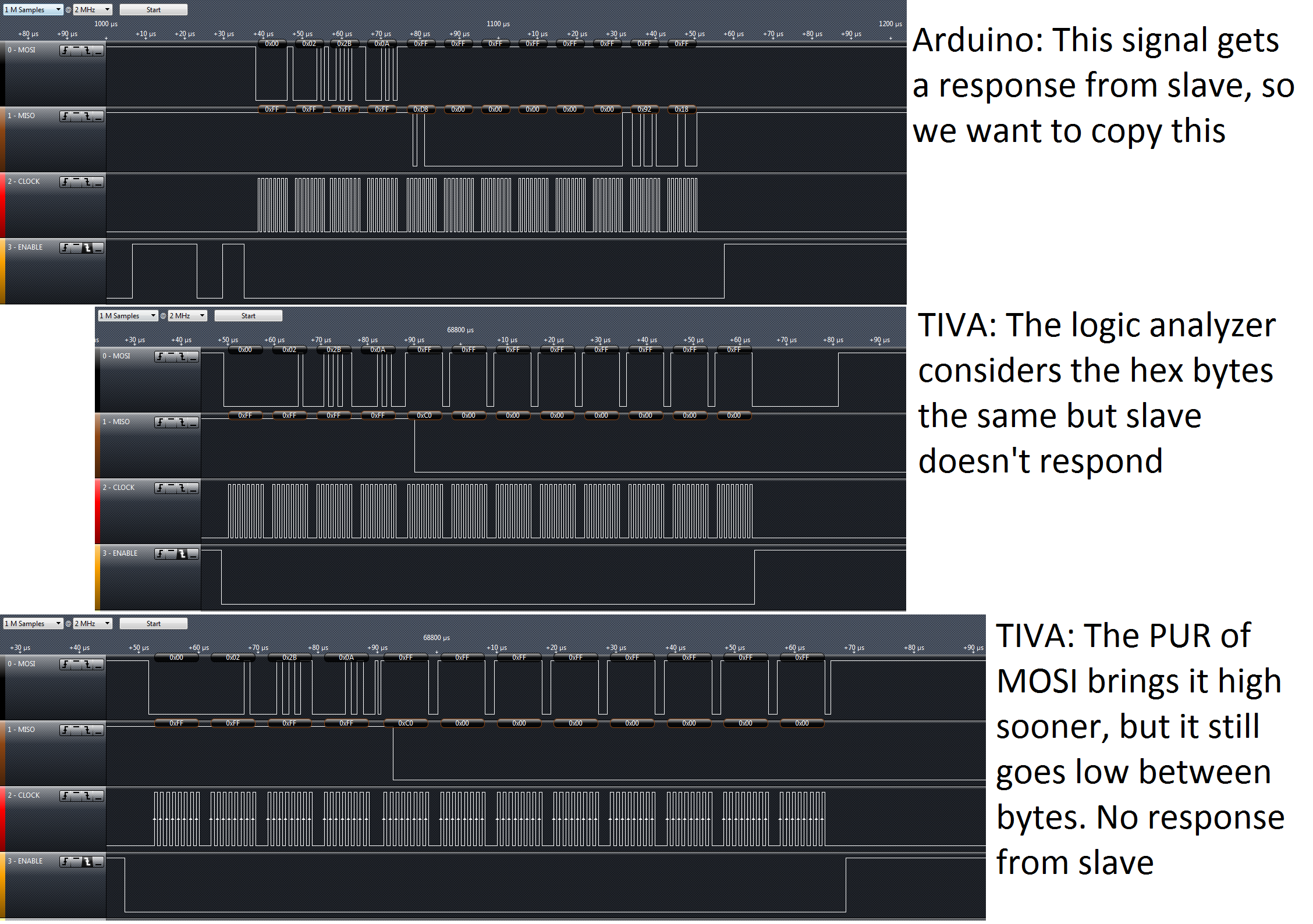
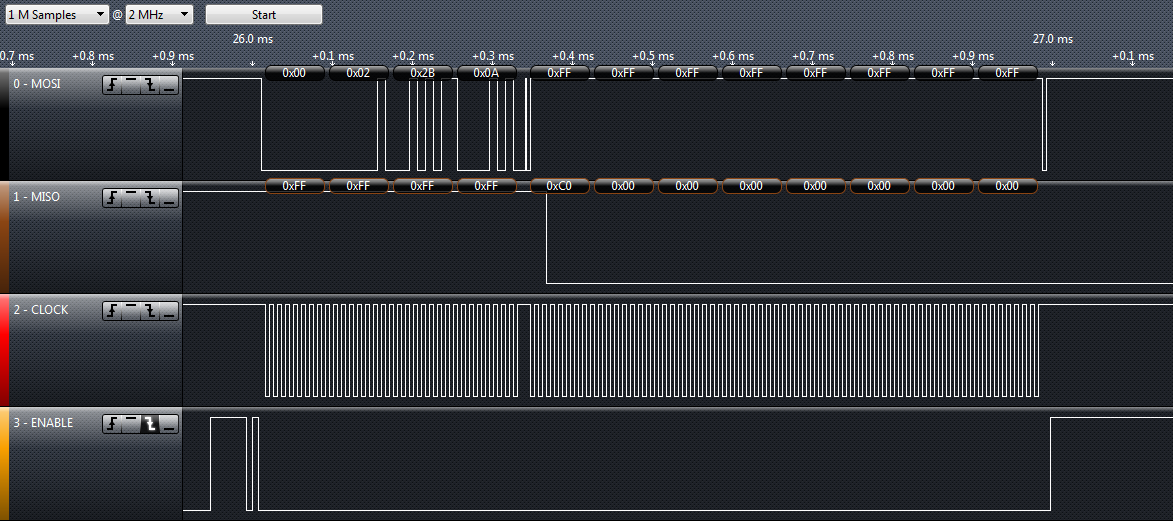
I am able to use SSIDataPut properly and verify with Logic Analyzer.
However, SSIDataGet is not reliable. It receives 4 bytes and then hangs at ssi.c:
//
// Wait until there is data to be read.
//
while(!(HWREG(ui32Base + SSI_O_SR) & SSI_SR_RNE))
{
}
What determines this?
My code:
//
// Initialize the data to send.
//
pui32DataTx2[0] = 0x00;
pui32DataTx2[1] = 0x02;
pui32DataTx2[2] = 0x2B;
pui32DataTx2[3] = 0x0A;
//
// Display indication that the SSI is transmitting data.
//
UARTprintf("\nSent2:\n ");
//CS low
GPIOPinWrite(GPIO_PORTH_BASE, GPIO_PIN_0, 0);
//
// Send 4 bytes of data.
//
for(ui32Index = 0; ui32Index < 4; ui32Index++)
{
//
// Display the data that SSI is transferring.
//
UARTprintf("'%i' ", pui32DataTx2[ui32Index]);
//
// Send the data using the "blocking" put function. This function
// will wait until there is room in the send FIFO before returning.
// This allows you to assure that all the data you send makes it into
// the send FIFO.
//
SSIDataPut(SSI0_BASE, pui32DataTx2[ui32Index]);
}
//
// Wait until SSI0 is done transferring all the data in the transmit FIFO.
//
while(SSIBusy(SSI0_BASE))
{
}
//
// Display indication that the SSI is receiving data.
//
UARTprintf("\nReceived2:\n ");
//
// Display the 8 bytes of data that were read from RX FIFO.
//
for(ui32Index = 0; ui32Index < 8; ui32Index++)
{
//
// Receive the data using the "blocking" Get function. This function
// will wait until there is data in the receive FIFO before returning.
//
SSIDataGet(SSI0_BASE, &pui32DataRx2[ui32Index]);
//
// Since we are using 8-bit data, mask off the MSB.
//
pui32DataRx2[ui32Index] &= 0x00FF;
//
// Display the data that SSI0 received.
//
UARTprintf("'%i' ", pui32DataRx2[ui32Index]);
UARTprintf("\nCount:'%i'", ui32Index);
}
//
// Wait until SSI0 is done transferring all the data in the transmit FIFO.
//
while(SSIBusy(SSI0_BASE))
{
}
//CS high
GPIOPinWrite(GPIO_PORTH_BASE, GPIO_PIN_0, GPIO_PIN_0);
Thanks,
Stephen