Other Parts Discussed in Thread: ISO1050
Hi,
I am trying to get CANBUS to work. I don't have much experience with it.
I have two TM4C194NCPDT Tiva Boards to act as two different CANBUS nodes.
I am using the code from Amit in this thread as reference: http://e2e.ti.com/support/microcontrollers/tiva_arm/f/908/t/363647
The UART and CANBUS initialization looks to be correct, so no modification was necessary in the code I believe. (usage of UART0 on A0, A1; CANBUS1 B0,B1)
I have the 3.3V and GND from the board connected to CANBUS transceivers SN65HVD231QD. Same pinout as the one Amit used in the above thread.
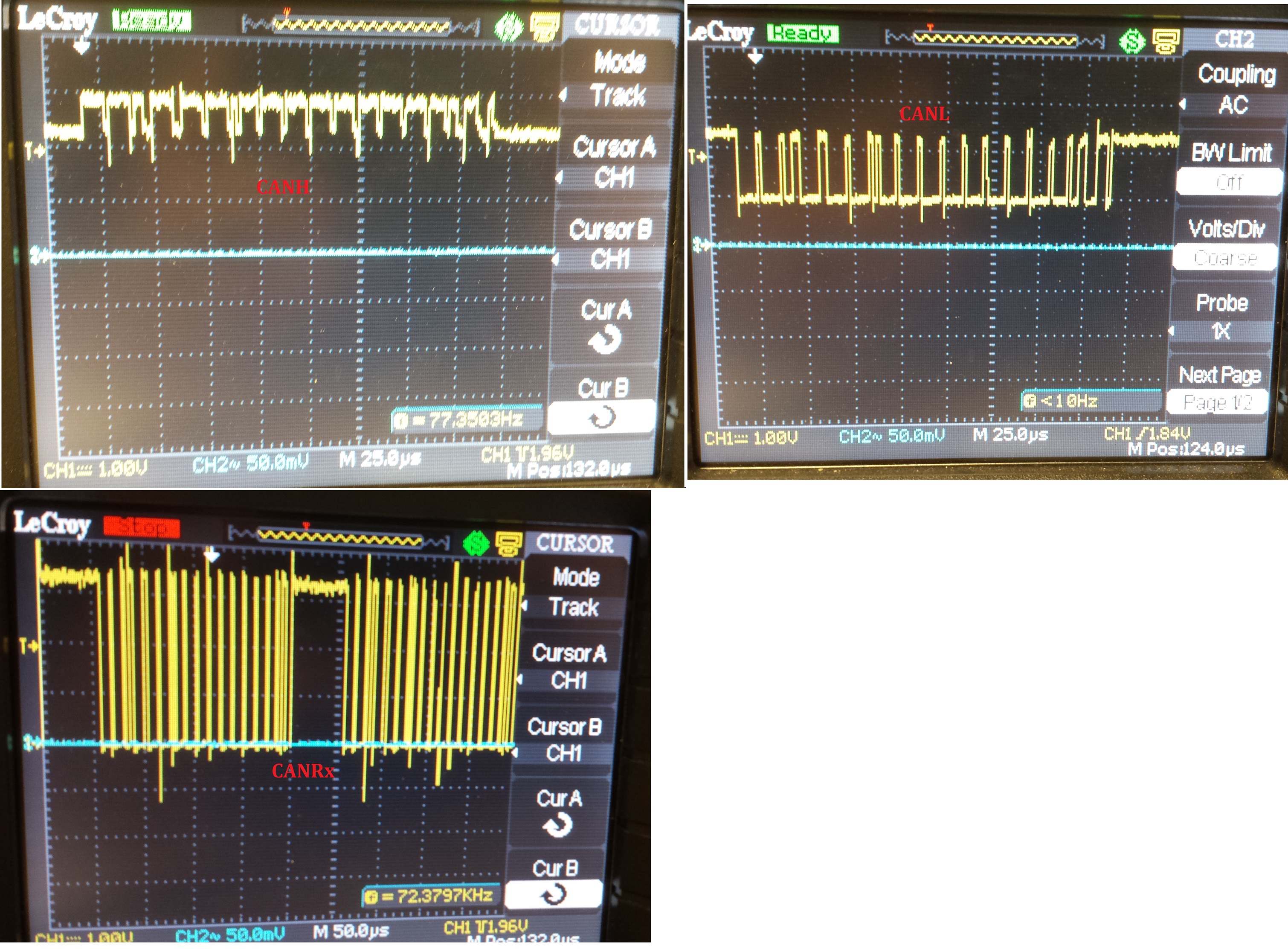
The D pin is connected to CAN1TX, R pin is connected to CAN1RX. CANH and CANL are terminated by 100 Ohm resistors (I didnt have 120ohm with me).
I dont have Vref connected to anything. Rs pin is grounded. These connections are done on a breadboard if that matters.
I have one board loaded with the TX code and other board loaded with RX code. I observe the UART print statements via putty console since each board's UART goes to a different COM port. It appears that the TX CANBUS hangs because it does not get past the first print statement (first message).
Does my hookup at least sound right? Any ideas what could be stopping this from plainly working?