Hi!
The problem:
In the code spi_master.c, characters are printed to the serial console window. Line 167 in the code is shown, line 168 is not shown. With these settings:
//
// Initialize the UART for console I/O.
//
UARTStdioConfig(0, 115200, 16000000); 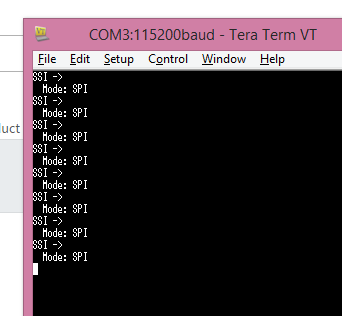
The console is also setup for 115200 bits/s.
Switching baud-rate, what happens? Its very strange that it cuts straight into a sentence.
What would possible cause this line: UARTprintf(" Data: 8-bit\n\n");
to not write the " a: 8-bit" ?

Pushing the resetbutton on launchpad, makes the same message appear after each "reset".
Talking with Putty instead?

My friend can run the code on a linux dist, using screen as serial console. Everything works fine. what is this sorcery?
Serial console programs: Putty and Tera term, both show the same error. Using standard: 8 bit data, 0 parity and 1 stop bit.
Platform: TM4C123GXL Launchpad, tiva c series
Program: Code Composer Studio, Version: 5.5.0.00077
Code:
C:\ti\TivaWare_C_Series-2.1.0.12573\examples\peripherals\ssi using the given example; spi_master.c
//*****************************************************************************
//
// spi_master.c - Example demonstrating how to configure SSI0 in SPI master
// mode.
//
// Copyright (c) 2010-2014 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
//
// This is part of revision 2.1.0.12573 of the Tiva Firmware Development Package.
//
//*****************************************************************************
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_memmap.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/ssi.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
//*****************************************************************************
//
//! \addtogroup ssi_examples_list
//! <h1>SPI Master (spi_master)</h1>
//!
//! This example shows how to configure the SSI0 as SPI Master. The code will
//! send three characters on the master Tx then polls the receive FIFO until
//! 3 characters are received on the master Rx.
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - SSI0 peripheral
//! - GPIO Port A peripheral (for SSI0 pins)
//! - SSI0Clk - PA2
//! - SSI0Fss - PA3
//! - SSI0Rx - PA4
//! - SSI0Tx - PA5
//!
//! The following UART signals are configured only for displaying console
//! messages for this example. These are not required for operation of SSI0.
//! - UART0 peripheral
//! - GPIO Port A peripheral (for UART0 pins)
//! - UART0RX - PA0
//! - UART0TX - PA1
//!
//! This example uses the following interrupt handlers. To use this example
//! in your own application you must add these interrupt handlers to your
//! vector table.
//! - None.
//
//*****************************************************************************
//*****************************************************************************
//
// Number of bytes to send and receive.
//
//*****************************************************************************
#define NUM_SSI_DATA 3
//*****************************************************************************
//
// This function sets up UART0 to be used for a console to display information
// as the example is running.
//
//*****************************************************************************
void
InitConsole(void)
{
//
// Enable GPIO port A which is used for UART0 pins.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Configure the pin muxing for UART0 functions on port A0 and A1.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
//
// Enable UART0 so that we can configure the clock.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
//
// Use the internal 16MHz oscillator as the UART clock source.
//
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
//
// Select the alternate (UART) function for these pins.
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Initialize the UART for console I/O.
//
UARTStdioConfig(0, 115200, 16000000);
}
//*****************************************************************************
//
// Configure SSI0 in master Freescale (SPI) mode. This example will send out
// 3 bytes of data, then wait for 3 bytes of data to come in. This will all be
// done using the polling method.
//
//*****************************************************************************
int
main(void)
{
uint32_t pui32DataTx[NUM_SSI_DATA];
uint32_t pui32DataRx[NUM_SSI_DATA];
uint32_t ui32Index;
//
// Set the clocking to run directly from the external crystal/oscillator.
// TODO: The SYSCTL_XTAL_ value must be changed to match the value of the
// crystal on your board.
//
SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN |
SYSCTL_XTAL_16MHZ);
//
// Set up the serial console to use for displaying messages. This is
// just for this example program and is not needed for SSI operation.
//
InitConsole();
//
// Display the setup on the console.
//
UARTprintf("SSI ->\n");
UARTprintf(" Mode: SPI\n");
UARTprintf(" Data: 8-bit\n\n");
//
// The SSI0 peripheral must be enabled for use.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI0);
//
// For this example SSI0 is used with PortA[5:2]. The actual port and pins
// used may be different on your part, consult the data sheet for more
// information. GPIO port A needs to be enabled so these pins can be used.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Configure the pin muxing for SSI0 functions on port A2, A3, A4, and A5.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PA2_SSI0CLK);
GPIOPinConfigure(GPIO_PA3_SSI0FSS);
GPIOPinConfigure(GPIO_PA4_SSI0RX);
GPIOPinConfigure(GPIO_PA5_SSI0TX);
//
// Configure the GPIO settings for the SSI pins. This function also gives
// control of these pins to the SSI hardware. Consult the data sheet to
// see which functions are allocated per pin.
// The pins are assigned as follows:
// PA5 - SSI0Tx
// PA4 - SSI0Rx
// PA3 - SSI0Fss
// PA2 - SSI0CLK
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeSSI(GPIO_PORTA_BASE, GPIO_PIN_5 | GPIO_PIN_4 | GPIO_PIN_3 |
GPIO_PIN_2);
//
// Configure and enable the SSI port for SPI master mode. Use SSI0,
// system clock supply, idle clock level low and active low clock in
// freescale SPI mode, master mode, 1MHz SSI frequency, and 8-bit data.
// For SPI mode, you can set the polarity of the SSI clock when the SSI
// unit is idle. You can also configure what clock edge you want to
// capture data on. Please reference the datasheet for more information on
// the different SPI modes.
//
SSIConfigSetExpClk(SSI0_BASE, SysCtlClockGet(), SSI_FRF_MOTO_MODE_0,
SSI_MODE_MASTER, 1000000, 8);
//
// Enable the SSI0 module.
//
SSIEnable(SSI0_BASE);
//
// Read any residual data from the SSI port. This makes sure the receive
// FIFOs are empty, so we don't read any unwanted junk. This is done here
// because the SPI SSI mode is full-duplex, which allows you to send and
// receive at the same time. The SSIDataGetNonBlocking function returns
// "true" when data was returned, and "false" when no data was returned.
// The "non-blocking" function checks if there is any data in the receive
// FIFO and does not "hang" if there isn't.
//
while(SSIDataGetNonBlocking(SSI0_BASE, &pui32DataRx[0]))
{
}
//
// Initialize the data to send.
//
pui32DataTx[0] = 's';
pui32DataTx[1] = 'p';
pui32DataTx[2] = 'i';
//
// Display indication that the SSI is transmitting data.
//
UARTprintf("Sent:\n ");
//
// Send 3 bytes of data.
//
for(ui32Index = 0; ui32Index < NUM_SSI_DATA; ui32Index++)
{
//
// Display the data that SSI is transferring.
//
UARTprintf("'%c' ", pui32DataTx[ui32Index]);
//
// Send the data using the "blocking" put function. This function
// will wait until there is room in the send FIFO before returning.
// This allows you to assure that all the data you send makes it into
// the send FIFO.
//
SSIDataPut(SSI0_BASE, pui32DataTx[ui32Index]);
}
//
// Wait until SSI0 is done transferring all the data in the transmit FIFO.
//
while(SSIBusy(SSI0_BASE))
{
}
//
// Display indication that the SSI is receiving data.
//
UARTprintf("\nReceived:\n ");
//
// Receive 3 bytes of data.
//
for(ui32Index = 0; ui32Index < NUM_SSI_DATA; ui32Index++)
{
//
// Receive the data using the "blocking" Get function. This function
// will wait until there is data in the receive FIFO before returning.
//
SSIDataGet(SSI0_BASE, &pui32DataRx[ui32Index]);
//
// Since we are using 8-bit data, mask off the MSB.
//
pui32DataRx[ui32Index] &= 0x00FF;
//
// Display the data that SSI0 received.
//
UARTprintf("'%c' ", pui32DataRx[ui32Index]);
}
//
// Return no errors
//
return(0);
}