


Hi all,
I've been trying to operate a motor controller via RS232 from TIVA.
SCX11 controller RS-232c Specification:
Transmission - Start-stop synchronous method, NRZ (Non-Return Zero), full-duplex
Data length - 8bits, 1stop, no parity
Transmission speed - 9600
Protocol - TTY (CR+LF)
Terminal Specification
• ASCII mode
• VT100 compatible recommended
• Handshake: None
• Transmission CR: C-R
• Word wrap: None
• Local echo: None
• Beep sound: ON
My code:
void CUART::initRS(void)
{
//
// Enable the GPIO Peripheral used by the UART.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOP);
//
// Enable UART6
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART6);
UARTConfigSetExpClk(UART6_BASE, _ui32SysClock, 9600, //was 8*115200
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
UARTDisable(UART6_BASE);
//
// Configure GPIO Pins for UART mode.
//
GPIOPinConfigure(GPIO_PP0_U6RX);
GPIOPinConfigure(GPIO_PP1_U6TX);
GPIOPinTypeUART(GPIO_PORTP_BASE, GPIO_PIN_0 | GPIO_PIN_1);
UARTEnable(UART6_BASE);
//
// Initialize the UART for console I/O.
//
// UARTStdioConfig(7, 9600, _ui32SysClock);
}
/*___________________________________________________
*
*
*/
void CUART::txRS(char ascii)
{
UARTCharPut(UART6_BASE, ascii);
}
/*___________________________________________________
*
*
*/
void CUART::txSCX()
{
char command;
command = 'm';
txRS(command);
command = 'a';
txRS(command);
command = ' ';
txRS(command);
command = '1';
txRS(command);
command = 0x0d;
txRS(command);
command = 0x0a;
txRS(command);
}
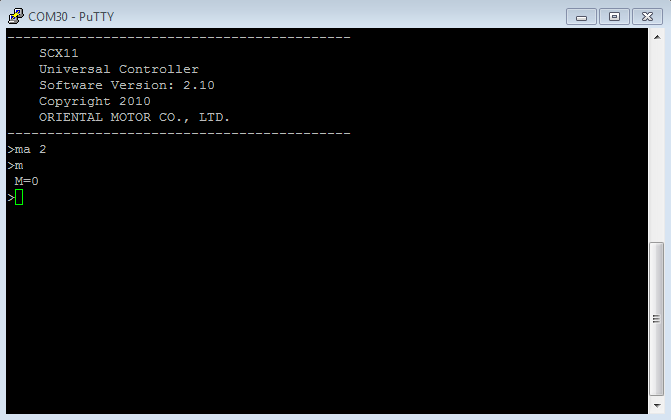
I looked into the terminal and see that the TIVA is only sending “m/r /n” instead of “ma 1/r/n”
See attached picture. First line is PC attempt, second line is TIVA attempt.
Looking through the forum posts I realized I may need delay/interrupt but I'm unsure if that is the cause of the problem
Any help appreciated
Thanks,
Stephen



