Other Parts Discussed in Thread: EK-TM4C1294XL, TM4C123GH6PM, TM4C1294NCPDT
Hello again.
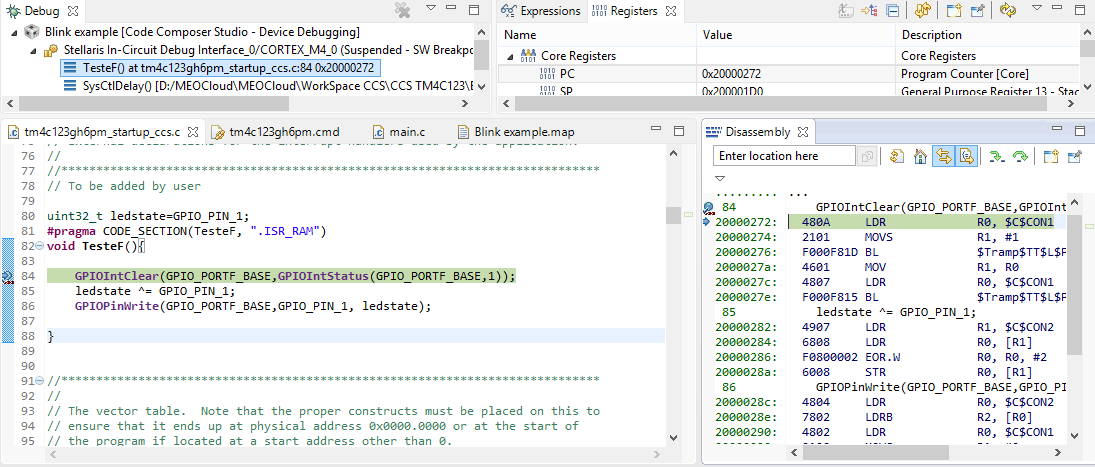
I'm using EK-TM4C1294XL board and CCS v5.5. I'd like to put my interrupt service routines code to RAM, so I can avoid ROM wait states and have ISR code executed faster. I know it can be done, I've read "Building Bare-Metal ARM Systems with GNU" by Miro Samek (you can google it), where author explains how to do it using GNU tools, which are little different form CCS's. I'm now working on porting Mr.Samek's solution to my project, but since I don't have much experience with linker scripts and bootloaders it will take me some time. So my question is this: does anyone have a working example of such code for CCS, and would like to share? Or maybe there's some TI's example, which I've not found?