I recently finished the Edx course - "Embedded Systems - shape the world", although I have to confess my understanding of the embedded world is still partial, though my spirit to execute and will to learn is on an all time high :).
I am trying to build a circuit for our instrumentation application which uses the ADC. The difference between the provided example and my requirement is : I want to trigger the ADC using external GPIO like a switch press (which would be implemented by inserting a push-button between any GPIO pin and GND).
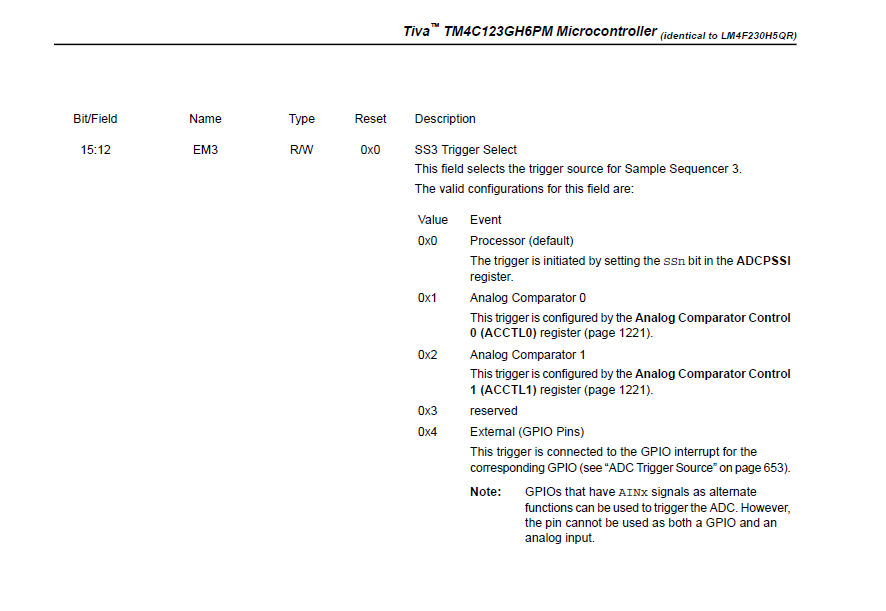
Upon reading a little of datasheet etc. I found this - the register responsible for this is : ADC Event Multiplexer Select (ADCEMUX), (Pg - 830, TM4C123G - TIVA Launchpad), where external triggers can be set by setting the bits 12:15 to 0x4.
Although I am stumped about how to proceed further. What other changes have to be made to this code of ADC as in the course that interfaces a slide potentiometer to the launchpad and uses software trigger?