Other Parts Discussed in Thread: EK-TM4C1294XL, EK-TM4C129EXL, ENERGIA
Hello,
I am getting familiar with the EK-TM4C1294XL board, trying to learn some basic things about ARM Cortex-M4 MCUs.
I need some help after having spent the entire day trying to implement SPI on EK-TM4C1294XL board.
I have browsed through several similar topics on this forum and played a little according to the suggestions therein, however without success. That is why I decided to make a new post.
The SPI device is an Analog Devices ADXL362 accelerometer that is mounted on a small breakout PCB. I have used that device sucessfully with a Raspberry Pi in the past.
Connections are as follows: I use the pins of the stacking connectors X6 and X7:
PQ0: SCLK
PQ1: ~CS
PQ2: MOSI
PQ3: MISO
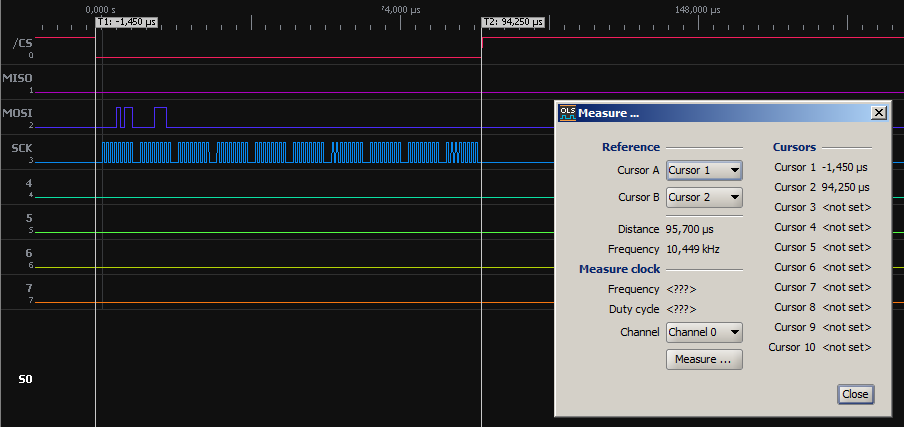
I use Open Bench Logic Sniffer on my laptop PC to spy on the SPI bus. The TiVa evaluation kit runs on my desktop PC.
The code I use is the following:
// InitSPI3() - initialize SPI on SSI3 // Based on code that is available at: // e2e.ti.com/.../1429666 void InitSPI3(uint32_t SystemClock, uint32_t SPIMode, uint32_t SPIBitRate) { // The SSI3 peripheral must be enabled for use. MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3); MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOQ); // Configure the pin muxing for SSI0 functions on port Q0, Q1, Q2, and Q3. MAP_GPIOPinConfigure(GPIO_PQ0_SSI3CLK); // SCLK MAP_GPIOPinConfigure(GPIO_PQ1_SSI3FSS); // ~CS MAP_GPIOPinConfigure(GPIO_PQ2_SSI3XDAT0); // MOSI MAP_GPIOPinConfigure(GPIO_PQ3_SSI3XDAT1); // MISO // Configure the GPIO settings for the SSI pins. This function also gives // control of these pins to the SSI hardware. // The pins are assigned as follows: // PQ2 - SSI3Tx // PQ3 - SSI3Rx // PQ1 - SSI3Fss // PQ0 - SSI3CLK MAP_GPIOPinTypeSSI(GPIO_PORTQ_BASE, GPIO_PIN_3 | GPIO_PIN_2 | GPIO_PIN_1 | GPIO_PIN_0); // Configure and enable the SSI port for SPI MASTER mode. MAP_SSIConfigSetExpClk(SSI3_BASE, SystemClock, SPIMode, SSI_MODE_MASTER, SPIBitRate, 8); //MAP_SSIAdvModeSet(SSI3_BASE, SSI_ADV_MODE_LEGACY); MAP_SSIAdvModeSet(SSI3_BASE, SSI_ADV_MODE_READ_WRITE); MAP_SSIAdvFrameHoldEnable(SSI3_BASE); MAP_SSIEnable(SSI3_BASE); } // used project 'hello' as a base int main(void) { ... uint32_t ui32ADXL362_ReadDevID[] = {0x0B, 0x00}; uint8_t i = 0; ... // // Run from the PLL at 120 MHz. // g_ui32SysClock = MAP_SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN | SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480), 120000000); // // Configure the device pins. // PinoutSet(false, false); ... // Initialize the SPI. // Settings are compatible with the ADXL362 accelerometer. // CPOL=CPHA = 0, f_SCLK, max = 1 MHz // InitSPI3(g_ui32SysClock, SSI_FRF_MOTO_MODE_0, 500000); ... SysCtlDelay(1); i = 0; while(i < 2) { SSIDataPutNonBlocking(SSI3_BASE, *(ui32ADXL362_ReadDevID+i++)); } SysCtlDelay(1); while(1) { ... } }
I try to read the Device ID by sending byte sequence 0x0B , 0x00 on the SPI bus. Page 20 of AD's datasheet shows the following waveforms for reading from a single address:
However, what I see on the SPI bus is different:
In InitSPI() function, using:
MAP_SSIAdvModeSet(SSI3_BASE, SSI_ADV_MODE_LEGACY);
results in having the ~CS line going to HIGH between successive byte transfers, which is not the desired case;
and using:
MAP_SSIAdvModeSet(SSI3_BASE, SSI_ADV_MODE_READ_WRITE); MAP_SSIAdvFrameHoldEnable(SSI3_BASE);
results in the above pattern EXCEPT for the end of transmission; ~CS line does not go to HIGH level . MISO line remains silent:
My question is:
is there any way to implement SPI correctly? What kind of detail am I missing?
I followed a suggestion here and here to use a GPIO pin as ~CS. Here is what I tried, albeit unsuccessfully:
void
InitSPI3(uint32_t SystemClock, uint32_t SPIMode, uint32_t SPIBitRate)
{
// The SSI3 peripheral must be enabled for use.
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOQ);
// Configure the pin muxing for SSI0 functions on port Q0, Q1, Q2, and Q3.
MAP_GPIOPinConfigure(GPIO_PQ0_SSI3CLK); // SCLK
//MAP_GPIOPinConfigure(GPIO_PQ1_SSI3FSS); // ~CS - commented out that line
MAP_GPIOPinConfigure(GPIO_PQ2_SSI3XDAT0); // MOSI
MAP_GPIOPinConfigure(GPIO_PQ3_SSI3XDAT1); // MISO
// Configure the GPIO settings for the SSI pins. This function also gives
// control of these pins to the SSI hardware.
// The pins are assigned as follows:
// PQ2 - SSI3Tx
// PQ3 - SSI3Rx
// PQ0 - SSI3CLK
// Excluding PQ1 from the following function call-will make that a GPIO line
MAP_GPIOPinTypeSSI(GPIO_PORTQ_BASE, GPIO_PIN_3 | GPIO_PIN_2 | GPIO_PIN_0);
// rest of function is same as above
}
int
main(void)
{
uint32_t ui32ADXL362_ReadDevID[] = {0x0B, 0x00};
uint8_t i = 0;
//
// Run from the PLL at 120 MHz.
//
g_ui32SysClock = MAP_SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |
SYSCTL_OSC_MAIN | SYSCTL_USE_PLL |
SYSCTL_CFG_VCO_480), 120000000);
//
// Configure the device pins.
//
PinoutSet(false, false);
...
//
// Initialize the SPI.
// Settings are compatible with the ADXL362 accelerometer.
// CPOL=CPHA = 0, f_SCLK, max = 1 MHz
//
InitSPI3(g_ui32SysClock, SSI_FRF_MOTO_MODE_0, 500000);
// Initalize ~CS as a GPIO pin.
GPIOPinTypeGPIOOutput(GPIO_PORTQ_BASE, GPIO_PIN_1);
...
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, 0);
SysCtlDelay(1);
i = 0;
while(i < 2)
{
SSIDataPutNonBlocking(SSI3_BASE, *(ui32ADXL362_ReadDevID+i++));
}
SysCtlDelay(1);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, 1);
...
}
..?
i need to make this simple thing work, therefore I really count on your kind assistance.