Other Parts Discussed in Thread: EK-TM4C1294XL, TM4C1294NCPDT
Hi,
I am using CCS 6.1.0.00104 and TivaWare_C_Series-2.1.1.71 for EK-TM4C1294XL
Imported freertos_demo project in workspace. Created a copy of the project as freeRTOS_2 in the same work space.
Made some changes in FreeRTOSConfig.h file for creating Timer tasks and changed configCPU_CLOCK_HZ. But those changes were not reflected. The reason was in Project => Build Settings => ARM Comiler, one of include path was pointing to freertos_demo project.
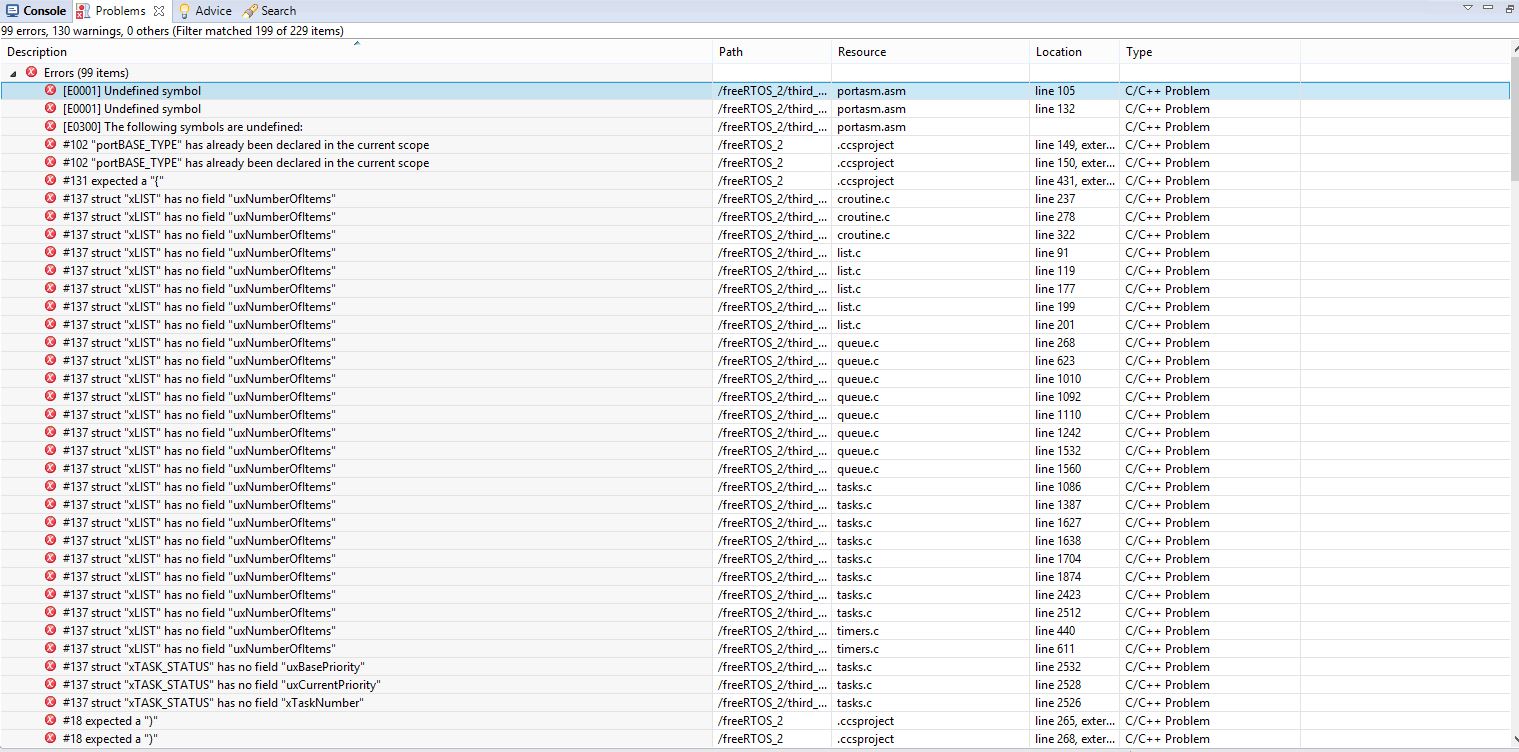
I changed this to point to freeRTOS_2 and after that when I tried to build the project it is showing many errors of variable not found. If I keep freertos_demo path than it is working fine.
Attached screenshot for error and the zip code. Can you help me out why this issue is happening?
Thanks,
Bhavesh