


Other Parts Discussed in Thread: HALCOGEN
I'm using a rotary encoder (dial switch) with the eQEP module of RM46.
The encoder has A and B 90° phase shifted, and the contacts are hardware debounced.
I started from he HALCoGen example_eqepEdgeCapture.c, and the code reacts on moving the encoder.
I have difficulties getting a reliable value in eqepREG1->QPOSCNT though.
I do get values in the register, but they don't really represent the number of clicks I rotate the encoder.
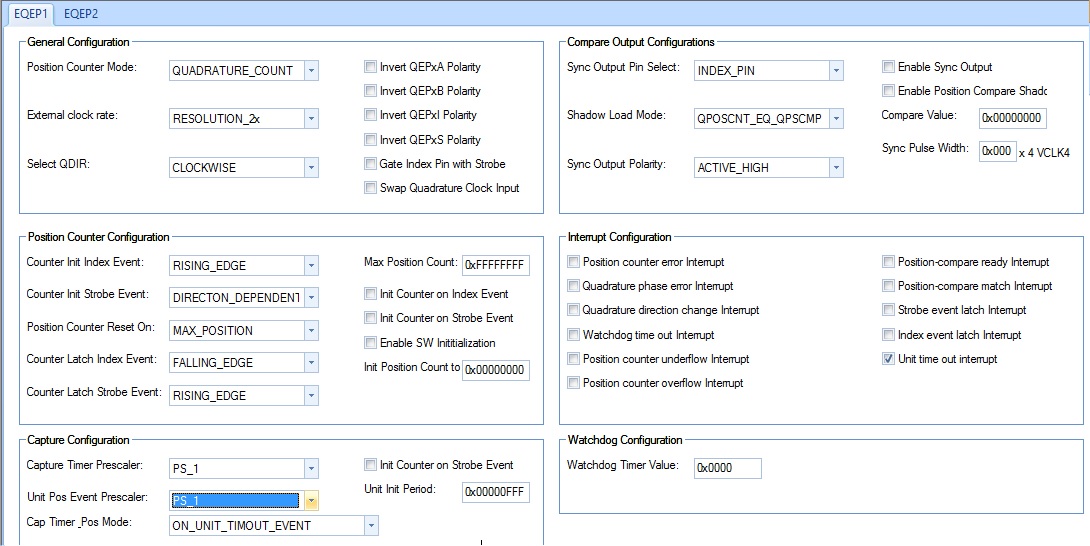
I'm struggling with what settings to use to get a representation of the rotation made (left or right in the eQEP eqepREG1->QPOSCNT.
Code (almost identical to the HALCoGen example_eqepEdgeCapture.c example:
/* USER CODE BEGIN (1) */
#include "eqep.h"
#include "sys_core.h"
#include <stdio.h>
/* USER CODE END */
void main(void)
{
/* USER CODE BEGIN (3) */
uint16 deltaT = 0U;
float velocity = 0U;
/* EQEP initialization based on GUI Configuration. */
QEPInit();
/* Enable Position Counter */
eqepEnableCounter(eqepREG1);
/* Enable Unit Timer. */
eqepEnableUnitTimer(eqepREG1);
/* Enable capture timer and capture period latch. */
eqepEnableCapture(eqepREG1);
while(1)
{
/* Status flag is set to indicate that a new value is latched in the QCPRD register. */
if((eqepREG1->QEPSTS & 0x80U) !=0U)
{
printf("Count %i!\n", eqepREG1->QPOSCNT);
/* Clear the Status flag. */
eqepREG1->QEPSTS |= 0x80U;
}
}
/* USER CODE END */
}
If you've used eQEP with a rotary encoder dial, it would be great if you share your experience.

