


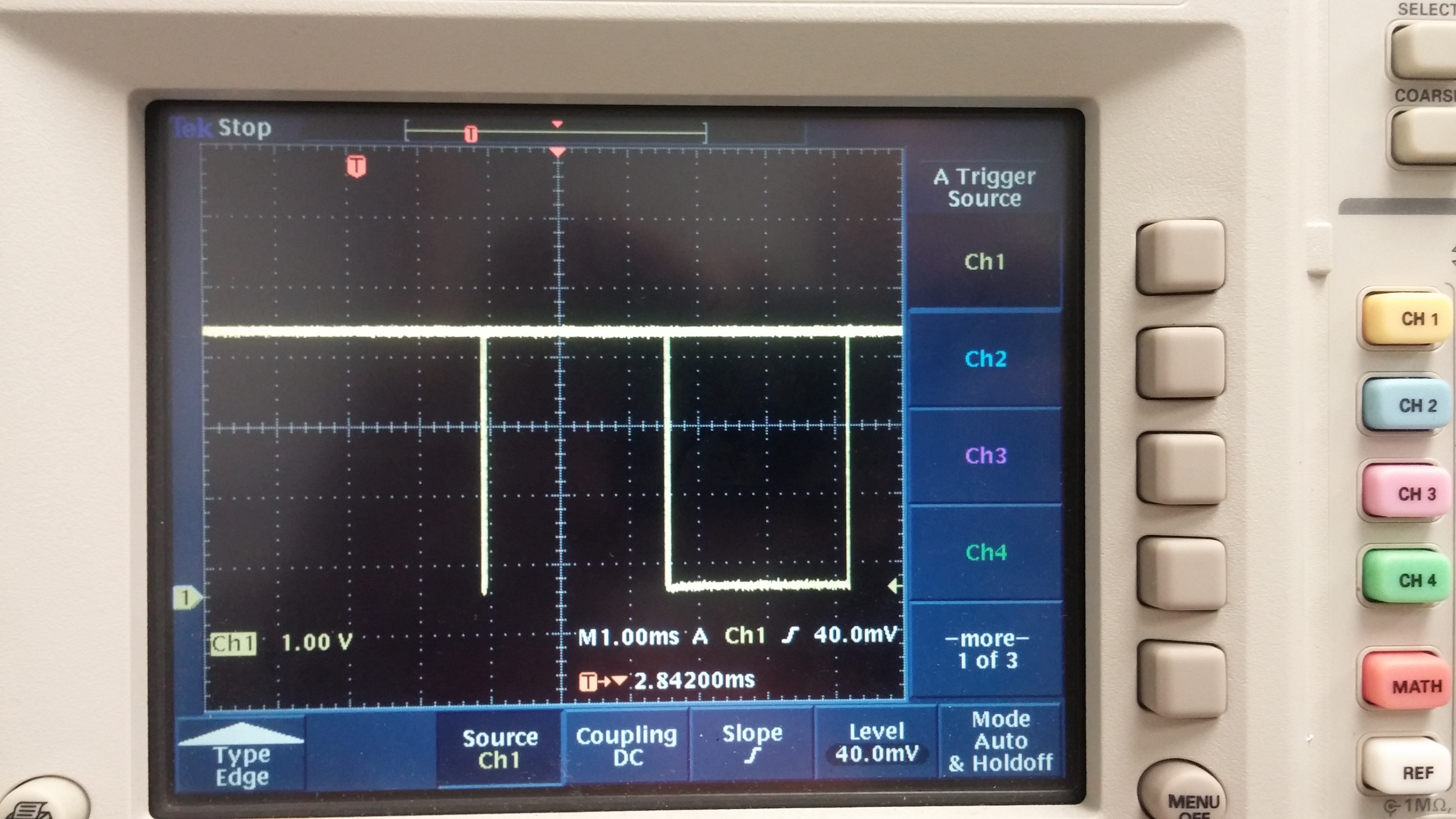
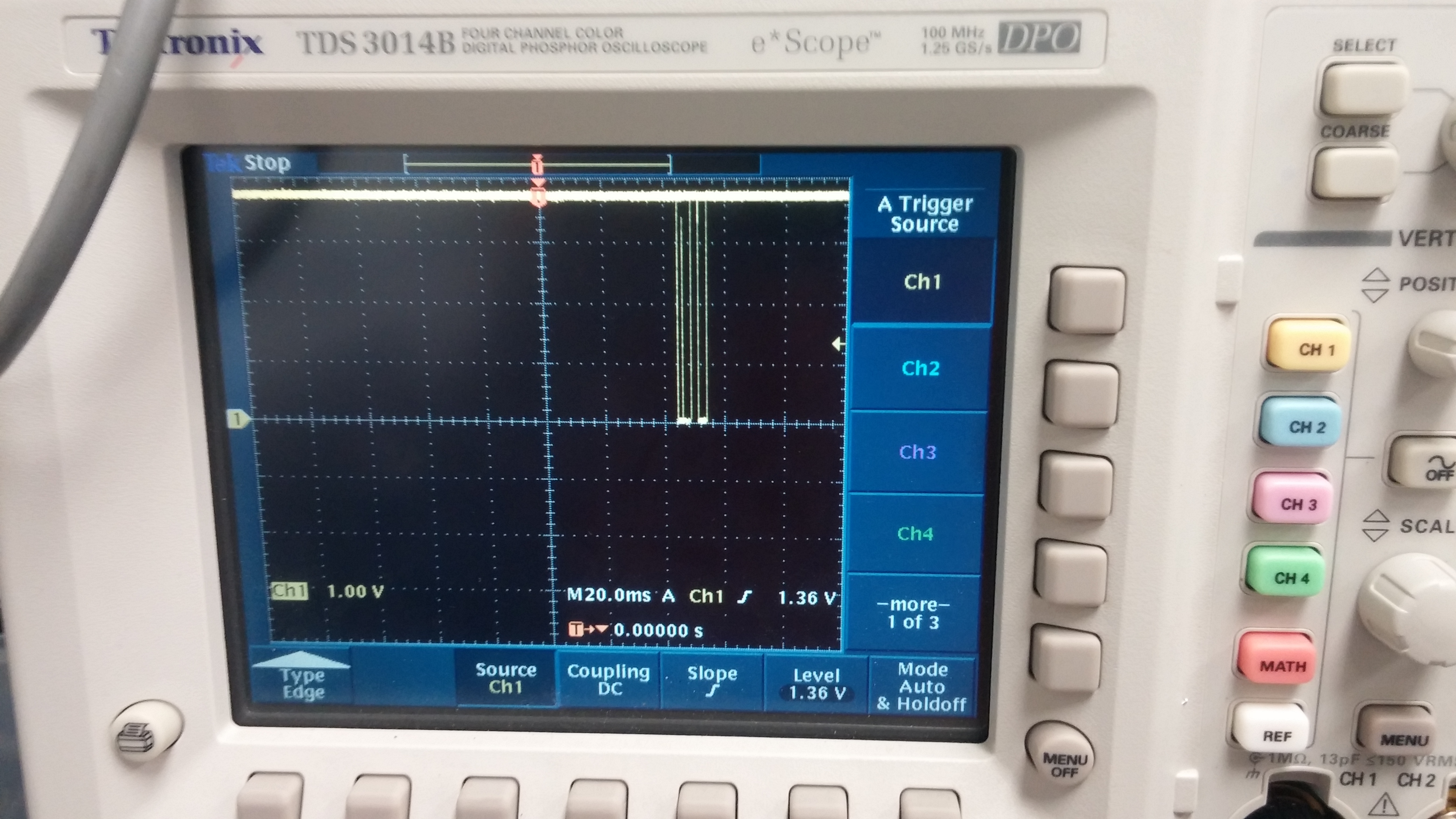
I'm working on connecting a few I2C chips to my TM4C129X EK board, so far I am able to get output but the output isn't what I am expecting. In the case of the MCP4725 chip I am seeing some behavior in the clock line that I am not expecting, A picture of the oscilloscope reading is attached, and the code I am using is below that (partially borrowed from another post). The VOUT line and the SDA line also appear to be reading 0. Any advice or help would be appreciated!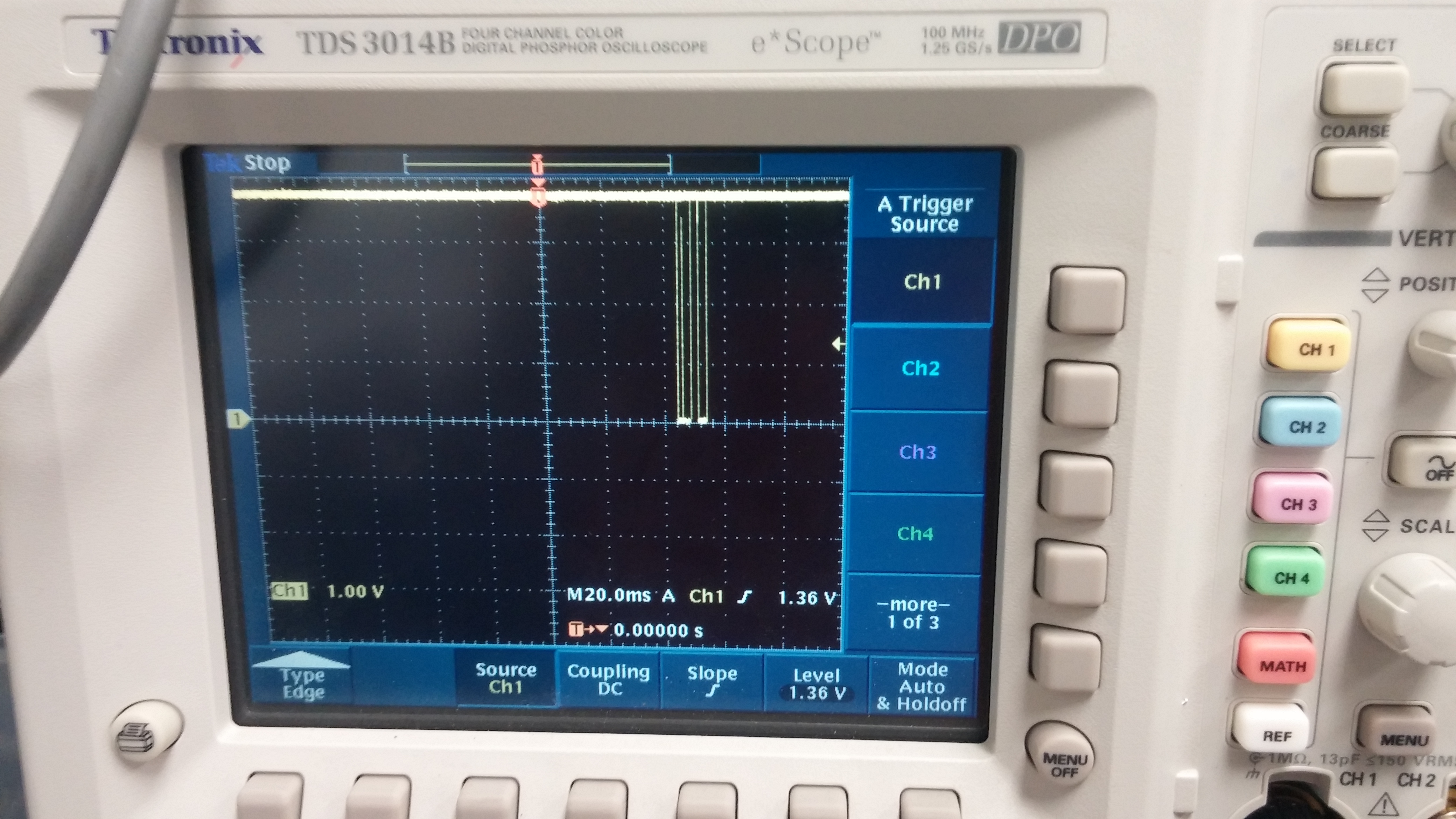
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_i2c.h"
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "driverlib/gpio.h"
#include "driverlib/i2c.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
#include "driverlib/rom_map.h"
#include "inc/hw_types.h"
#include "inc/hw_gpio.h"
uint32_t ui32SysClock;
volatile uint8_t data[10];
//const uint8_t INA219address = 0x40;
const uint8_t MCP4725address = 0x62;
const bool DebuggingMode = true;
void InitConsole(void)
{
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
UARTStdioConfig(0, 115200, 16000000);
}
void i2c0_init()
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C0);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
MAP_GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_3);
MAP_GPIOPinConfigure(GPIO_PB3_I2C0SDA);
MAP_GPIOPinTypeI2CSCL(GPIO_PORTB_BASE, GPIO_PIN_2);
MAP_GPIOPinConfigure(GPIO_PB2_I2C0SCL);
I2CMasterInitExpClk(I2C0_BASE, ui32SysClock, false);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Initializing I2C0 -> Error: %u ",I2CMasterErr(I2C0_BASE));
}
uint32_t i2c0_write(uint8_t addr, uint8_t *value, uint8_t N)
{
uint32_t error = { 0 };
uint8_t i;
I2CMasterSlaveAddrSet(I2C0_BASE, addr, false);
if(N==1){
// I2CMasterSlaveAddrSet(I2C0_BASE, addr>>1, false);
//I2CMasterSlaveAddrSet(I2C0_BASE, addr, false);
// while (I2CMasterBusy(I2C0_BASE));
I2CMasterDataPut(I2C0_BASE, value);
//while (I2CMasterBusy(I2C0_BASE));
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_SINGLE_SEND);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Sending data(%X) -> Error: %u ",value, I2CMasterErr(I2C0_BASE));
}
else{
I2CMasterDataPut(I2C0_BASE, value[0]);
while (I2CMasterBusBusy(I2C0_BASE));
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_BURST_SEND_START);
while (I2CMasterBusy(I2C0_BASE));
//TODO change this to a try catch or something
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ",value[0], I2CMasterErr(I2C0_BASE));
for (i=1;i<(N-1);i++)
{
I2CMasterDataPut(I2C0_BASE, value[i]);
//while (I2CMasterBusy(I2C0_BASE));
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_BURST_SEND_CONT);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ",value[i], I2CMasterErr(I2C0_BASE));
}
I2CMasterDataPut(I2C0_BASE, value[N-1]);
//while (I2CMasterBusy(I2C0_BASE));
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_BURST_SEND_FINISH);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ", value[N-1], I2CMasterErr(I2C0_BASE));
}
return I2CMasterErr(I2C0_BASE);
}
void i2c0_read(uint8_t addr, uint8_t *RxData, uint8_t N)
{
uint8_t i;
// I2CMasterSlaveAddrSet(I2C0_BASE, addr>>1, true);
I2CMasterSlaveAddrSet(I2C0_BASE, addr, true);
while (I2CMasterBusBusy(I2C0_BASE));
if (N==1)
{
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_SINGLE_RECEIVE);
while (I2CMasterBusy(I2C0_BASE));
RxData[0]=I2CMasterDataGet(I2C0_BASE);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ",RxData[0], I2CMasterErr(I2C0_BASE));
}
else
{
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_BURST_RECEIVE_START);
while (I2CMasterBusy(I2C0_BASE));
RxData[0]=I2CMasterDataGet(I2C0_BASE);
while (I2CMasterBusy(I2C0_BASE));
//TODO change this to a try catch or something
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ",RxData[0], I2CMasterErr(I2C0_BASE));
for (i=1;i<(N-1);i++)
{
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_BURST_RECEIVE_CONT);
while (I2CMasterBusy(I2C0_BASE));
RxData[i]=I2CMasterDataGet(I2C0_BASE);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ",RxData[i], I2CMasterErr(I2C0_BASE));
}
I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_BURST_RECEIVE_FINISH);
while (I2CMasterBusy(I2C0_BASE));
RxData[N-1]=I2CMasterDataGet(I2C0_BASE);
while (I2CMasterBusy(I2C0_BASE));
if (DebuggingMode) UARTprintf("\n Reading data(%X) -> Error: %u ",RxData[N-1], I2CMasterErr(I2C0_BASE));
}
}
int
main(void)
{
MAP_SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN |
SYSCTL_USE_PLL |
SYSCTL_CFG_VCO_320), 16000000);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPION);
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE,GPIO_PIN_0 | GPIO_PIN_1);
GPIOPinWrite(GPIO_PORTN_BASE,GPIO_PIN_0,0);
GPIOPinWrite(GPIO_PORTN_BASE,GPIO_PIN_1,0);
InitConsole();
i2c0_init();
uint8_t Rx[2]={0,0};
uint8_t Tx[4] = {0,0,0,0};
uint32_t i;
uint32_t index = 120000000/8; // Produces an approximately 1 sec
//SEt the register to read
while(1){
Tx[0]= MCP4725address;
Tx[1] = 64;
Tx[2] = 8;
Tx[3] = 0;
i2c0_write(MCP4725address, Tx, 3);
// //read Shunt Voltage one time
Rx[0] = 0;
Rx[1] = 0;
// Read the data
i2c0_read(MCP4725address,Rx,2);
int shuntVoltage = Rx[0]*256+Rx[1];
UARTprintf("\n ");
UARTprintf("\n Shunt Voltage: %i ",shuntVoltage);
UARTprintf("\n ");
UARTprintf("*************************************************\n ");
//poor mans delay
for (i=0;i<index;i++){
//Wait for 120000000 Cnts
}
}
}


{kind=link}