Other Parts Discussed in Thread: EK-TM4C1294XL
Hello,
I am making some tests on the evaluation board EK-TM4C1294XL. I am trying to make the board talk to the CC1110 via SPI bus.
I managed to make the Ti-RTOS SPI loopback example works on the evaluation board. The CC1110 is the master and the TM4C is the slave.
In our test we were using the SSI3 peripheral.
The program running on the CC1110 can also communicate with other C1110 via SPI.
So it seems that the problem come from voltage difference between the CC1110 and the evaluation board.
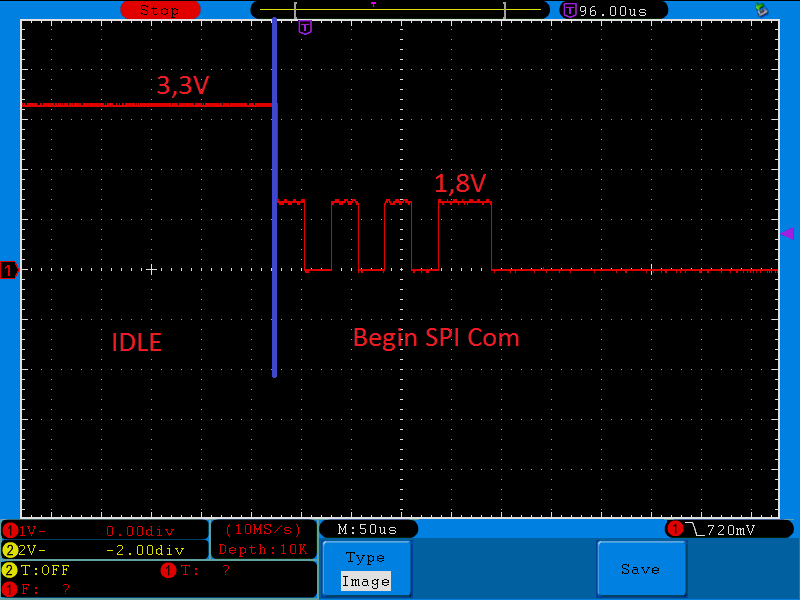
In fact, we found that the PQ2 pin is forcing the MOSI pin to 1,8 V instead of 3,3V which is the power supply of the CC1110 and the evaluation board. That's why the SPI transaction end well (return OK) but return only 0's.
For information, the CC1110 is powered by the CC debugger and the evaluation board is powered by the on-board debugger.
Thank you in advance for your help,
If you need any further informations (code, images), please ask.
Best Regards,
Yannick Riou