Other Parts Discussed in Thread: LM3S8971, INA282
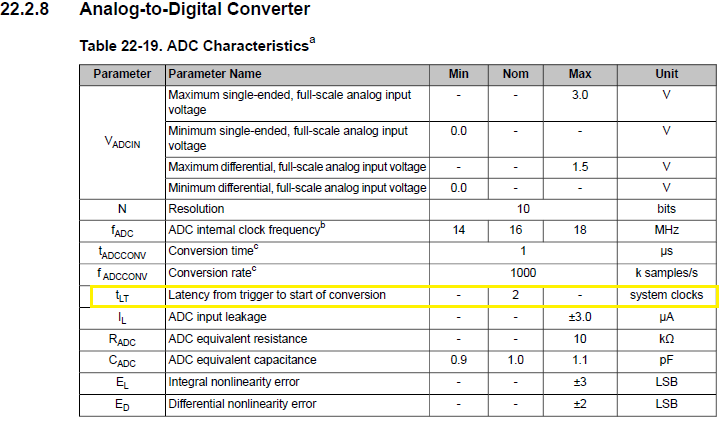
Seems plausible hardware averaging decreases throughput by a factor of the SPS factor would impact the listed conversion time (tADCCONV = 1us).
Example: If 8x over sampling is enabled the conversion time multiplies to 8us or is only the latency from trigger to interrupt (2 SYSCLK's) multiplied by the conversion factor.