Other Parts Discussed in Thread: TM4C1294NCPDT, EK-TM4C1294XL
Hello everyone, I am back with a question regarding SSI3/SPI functionality on TM4C1294NCPDT; I am working on the EK-TM4C1294XL evaluation board.
I have built an add-on card that sits on connectors X6 and X7 of the EK-TM4C1294XL board. On this card, I have attached a connector where I attach an SPI slave device. (The devices I use are proprietary and I cannot give any information about them, except for an important detail that I will discuss below.)
In my firmware, I have inserted several switch()-case()... decision trees to make it work with all kinds of SPI devices that I want to test. What I am presenting below is the function that initializes SSI3 as SPI / Mode 0 (using Port Q and having ~CS on a GPIO line, PQ1):
// InitSPI(uint32_t SCLK)
//
// Configures SSI3 in master Freescale (SPI) mode using polling method.
// Uses PQ1 to drive the ~CS line.
void InitSPI(uint32_t SCLK)
{
uint8_t pui8DataRx[10]; // local variable for flushing the SSI/SPI RX buffer
// The SSI3 peripheral must be enabled for use.
//ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3);
// For this example SSI3 is used with PortQ[0:3].
// GPIO port Q needs to be enabled so these pins can be used.
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOQ);
ROM_GPIOPinTypeGPIOInput(GPIO_PORTQ_BASE, GPIO_PIN_3); // MISO - configure it as GPIO input
ROM_GPIOPinTypeGPIOOutput(GPIO_PORTQ_BASE, GPIO_PIN_2); // MOSI - configure it as GPIO output
ROM_GPIOPinTypeGPIOOutput(GPIO_PORTQ_BASE, GPIO_PIN_0); // SCLK - configure it as GPIO output
ROM_GPIOPinTypeGPIOOutput(GPIO_PORTQ_BASE, GPIO_PIN_1); // ~CS - configure it as GPIO output
CS_High(); // ~CS - set it to logic HIGH
pinType = GPIODirModeGet(GPIO_PORTQ_BASE, GPIO_PIN_1); // ~CS
pinType = GPIODirModeGet(GPIO_PORTQ_BASE, GPIO_PIN_0); // SCLK
pinType = GPIODirModeGet(GPIO_PORTQ_BASE, GPIO_PIN_2); // MOSI
pinType = GPIODirModeGet(GPIO_PORTQ_BASE, GPIO_PIN_3); // MISO
// The SSI3 peripheral must be enabled for use.
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3);
// Configure the pin muxing for SSI3 functions on port Q0, Q2 and Q3.
// This step is not necessary if your part does not support pin muxing.
GPIOPinConfigure(GPIO_PQ0_SSI3CLK); // SCLK
GPIOPinConfigure(GPIO_PQ2_SSI3XDAT0); // MOSI
GPIOPinConfigure(GPIO_PQ3_SSI3XDAT1); // MISO
// Configure the GPIO settings for the SSI pins. This function also gives
// control of these pins to the SSI hardware. Consult the data sheet to
// see which functions are allocated per pin.
// The pins are assigned as follows:
// PQ3 - SSI0Rx
// PQ2 - SSI0Tx
// PQ1 - SSI0Fss
// PQ0 - SSI0CLK
ROM_GPIOPinTypeSSI(GPIO_PORTQ_BASE, GPIO_PIN_3 | GPIO_PIN_2 | GPIO_PIN_0);
// Configure and enable the SSI port for SPI master mode. Use SSI3,
// system clock supply, idle clock level low and active low clock in
// Freescale SPI mode, master mode, and 8-bit data.
// For SPI mode, you can set the polarity of the SSI clock when the SSI
// unit is idle. You can also configure what clock edge you want to
// capture data on. Please reference the datasheet for more information on
// the different SPI modes.
ROM_SSIDisable(SSI3_BASE); // Disable the SSI3 module to configure it
ROM_SSIConfigSetExpClk(SSI3_BASE,
g_ui32SysClock, // this is a global variable to set system clock frequency
SSI_FRF_MOTO_MODE_0,
SSI_MODE_MASTER,
SCLK,
8);
ROM_SSIEnable(SSI3_BASE); // Enable the SSI3 module.
// Read any residual data from the SSI port. This makes sure the receive
// FIFOs are empty, so we don't read any unwanted junk. This is done here
// because the SPI SSI mode is full-duplex, which allows you to send and
// receive at the same time. The SSIDataGetNonBlocking function returns
// "true" when data was returned, and "false" when no data was returned.
// The "non-blocking" function checks if there is any data in the receive
// FIFO and does not "hang" if there isn't.
while(ROM_SSIDataGetNonBlocking(SSI3_BASE, (uint32_t*)&pui8DataRx[0]))
{
}
// Last, initialize number of SPI transfers to zero
ui32SPITransfers = 0;
}
Below are some information that I can share about the SPI devices that I am trying to test. Both devices have been tested and found to be functional using another, third-party measurement system.
Device #1 has four independent pads for SPI - ~CS, SCLK, MOSI and MISO. This device works fine with the firmware.
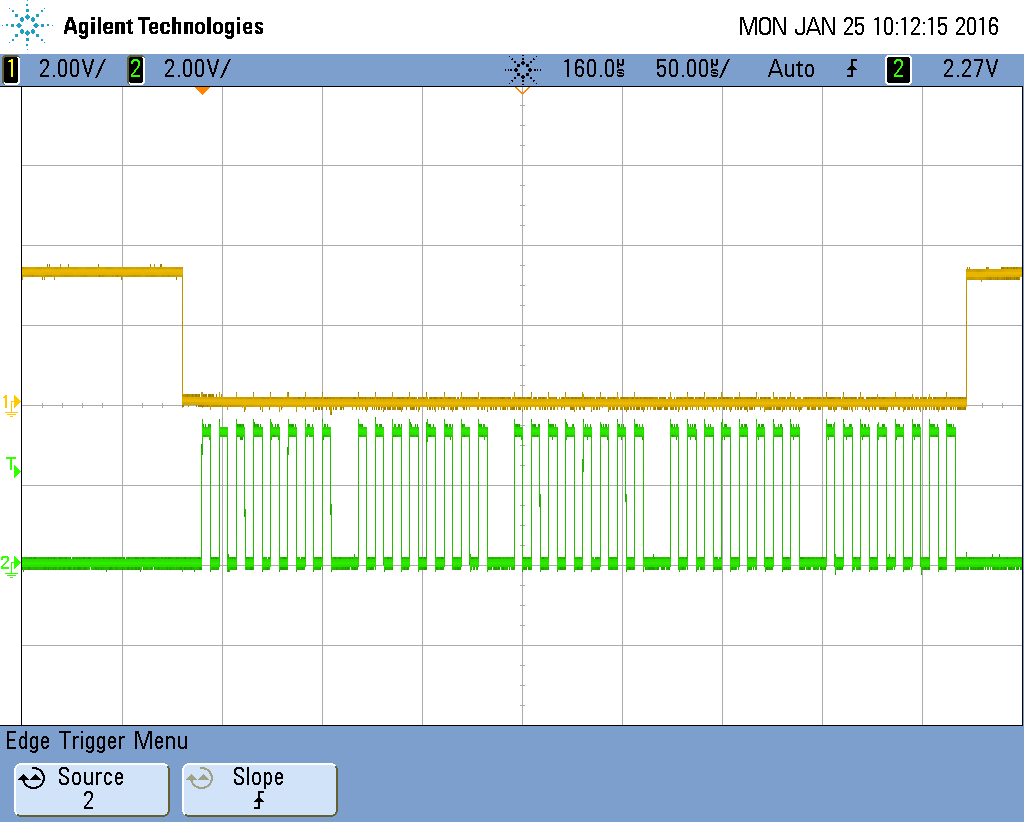
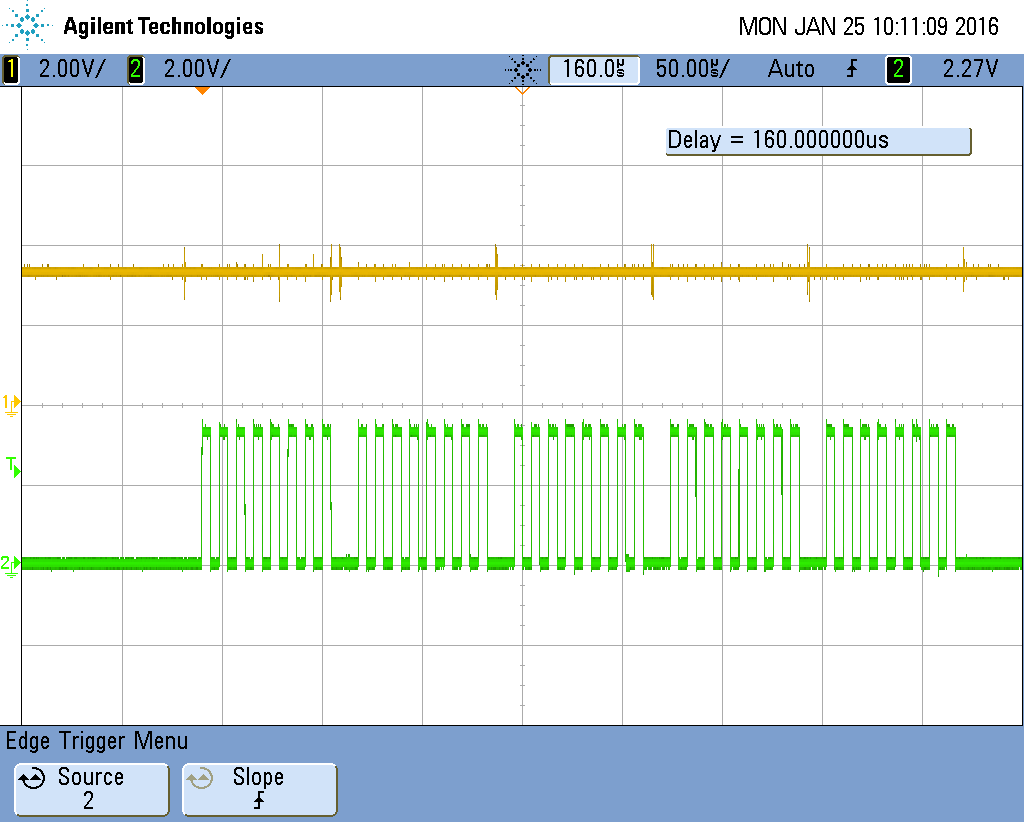
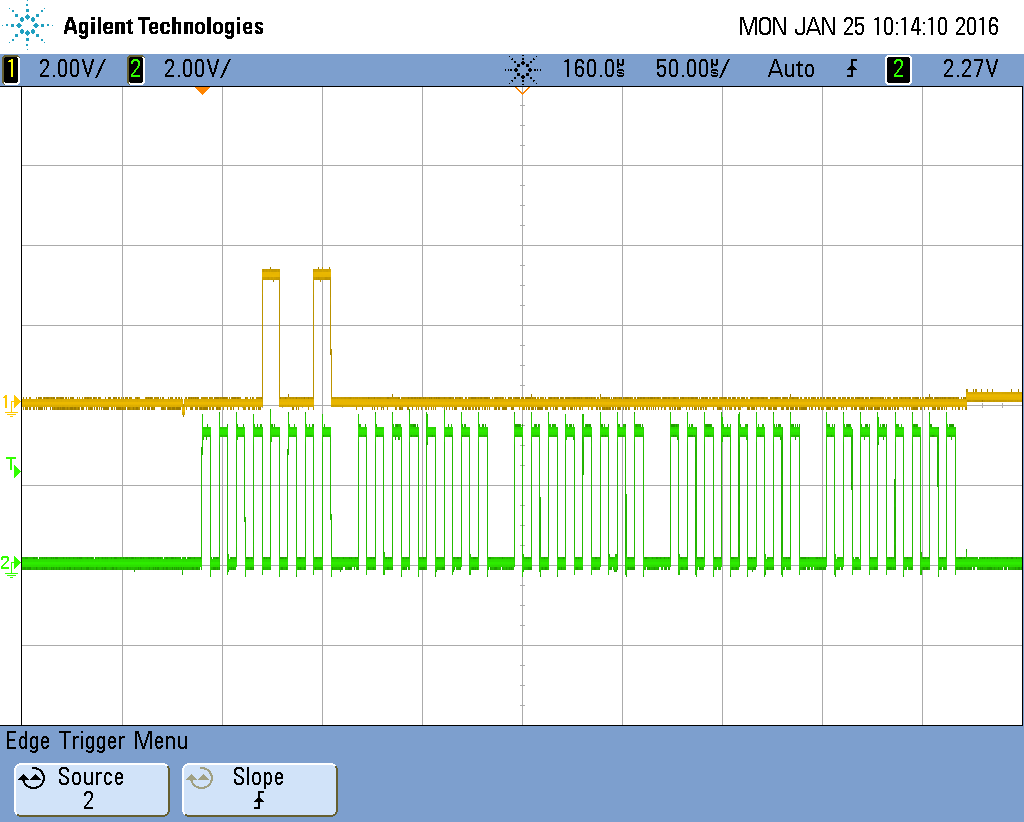
Device #2 shares two out of four pads with TWI - namely, SCL/SCLK and SDA/MOSI; moreover, the ~CS pad is internally pulled up and should be driven LOW in order for the device to enter SPI mode. On that device, I keep on having the SDA/MOSI line at logic HIGH, no matter what data I send to the device. This results in getting 0xFF on the MISO line when I try to read data from the device.
I have been searching through this forum all day long and I have found the following post that resembles, to some extent, my case: SSI interface with accelerometer(H3LIS331DL). It states something about locked MCU pins and that was indicated as a solution to this problem. However, by browsing quickly through the MCU datasheet, I could not find anything relevant to that issue.
Does anyone have any idea on how can I get device #2 - that is otherwise functional, I repeat - to work on my test rig? Your answers are most welcome.