


Other Parts Discussed in Thread: TM4C123GH6PM
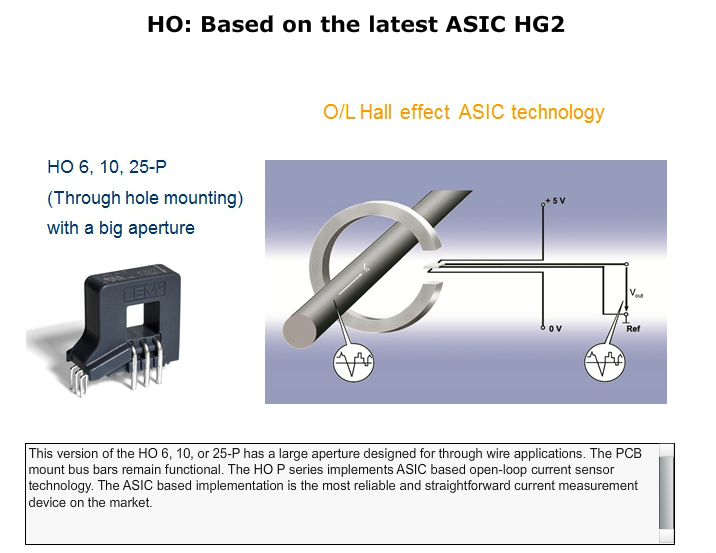
I am using the current sensor HO 10-P with my TM4C123 launchpad board. I am a bit confused how to use the sensor and read in the code. Page 12 of the datasheet has a pinmap and I am planning to use those 5 pin like below
1. Uc = supply voltage =5V
2. 0V= GND
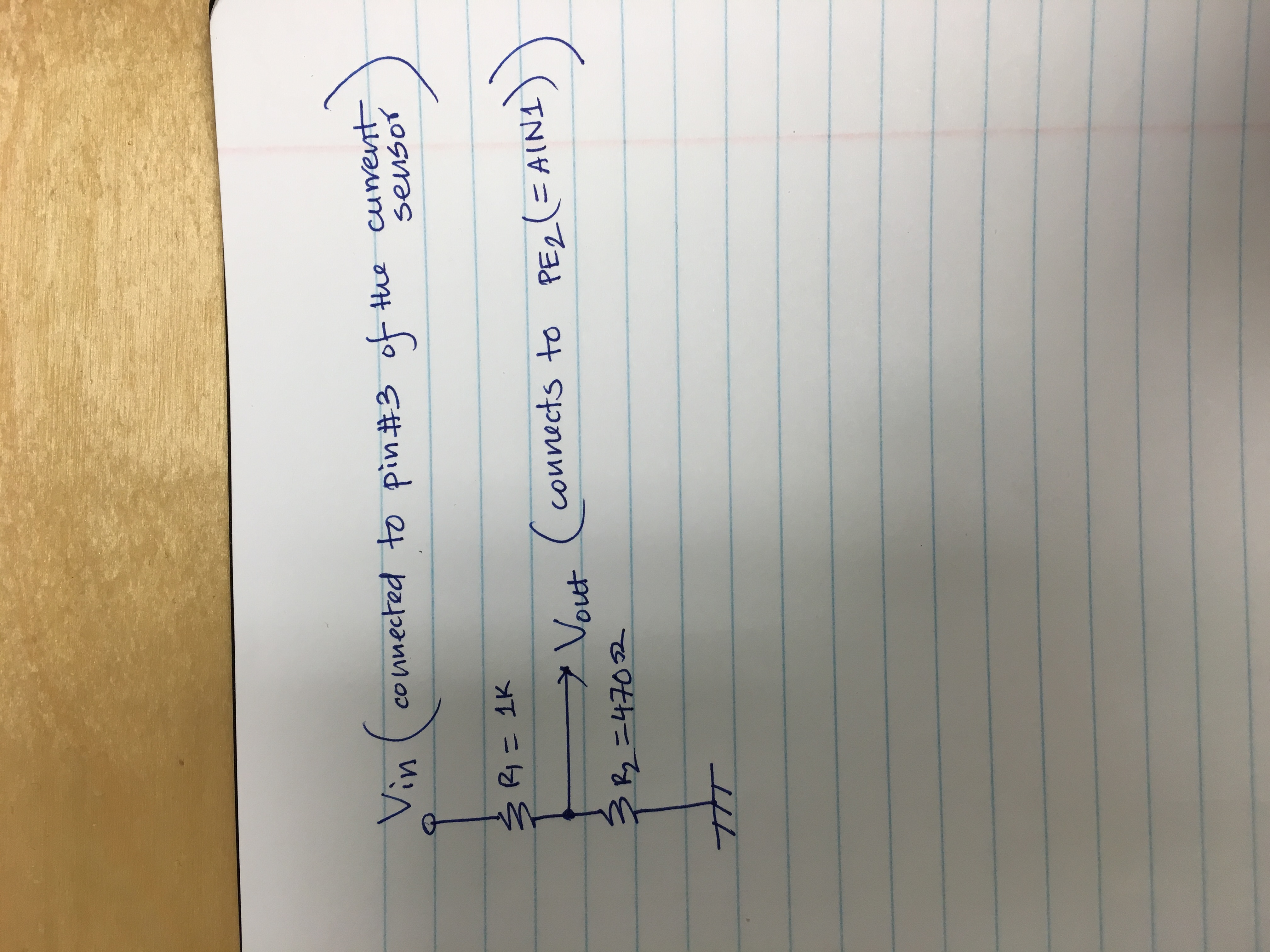
3. Vout = it actually goes to the analog pin of the microcontroller, in this case I use A7
4. Vref = 3.3V
5. OCD = GND (as suggested by this training manual)
Having done that, I am wondering if we just read the analog pin with analogread, is that enough to find out the current value? Or do I need to do some type of mapping to extract the exact current value?



{kind=link}