


Hi, just a warning that this post will be somewhat long as I wanted to include as much details as possible for easier support.
The problem I'm having is that the sensors will only read in values once, and then it's stuck. Also, I'm not sure if it's reading in the right values or not.
I'm trying to interface with a 1-wire temperature sensor DS18B20+ from Maxim with the TM4C1294 launchpad. I'm following the instruction on how to do so at this link here from maxim, where it uses the UART module to interface with the 1-wire device. I connected everything based on Figure 2b.
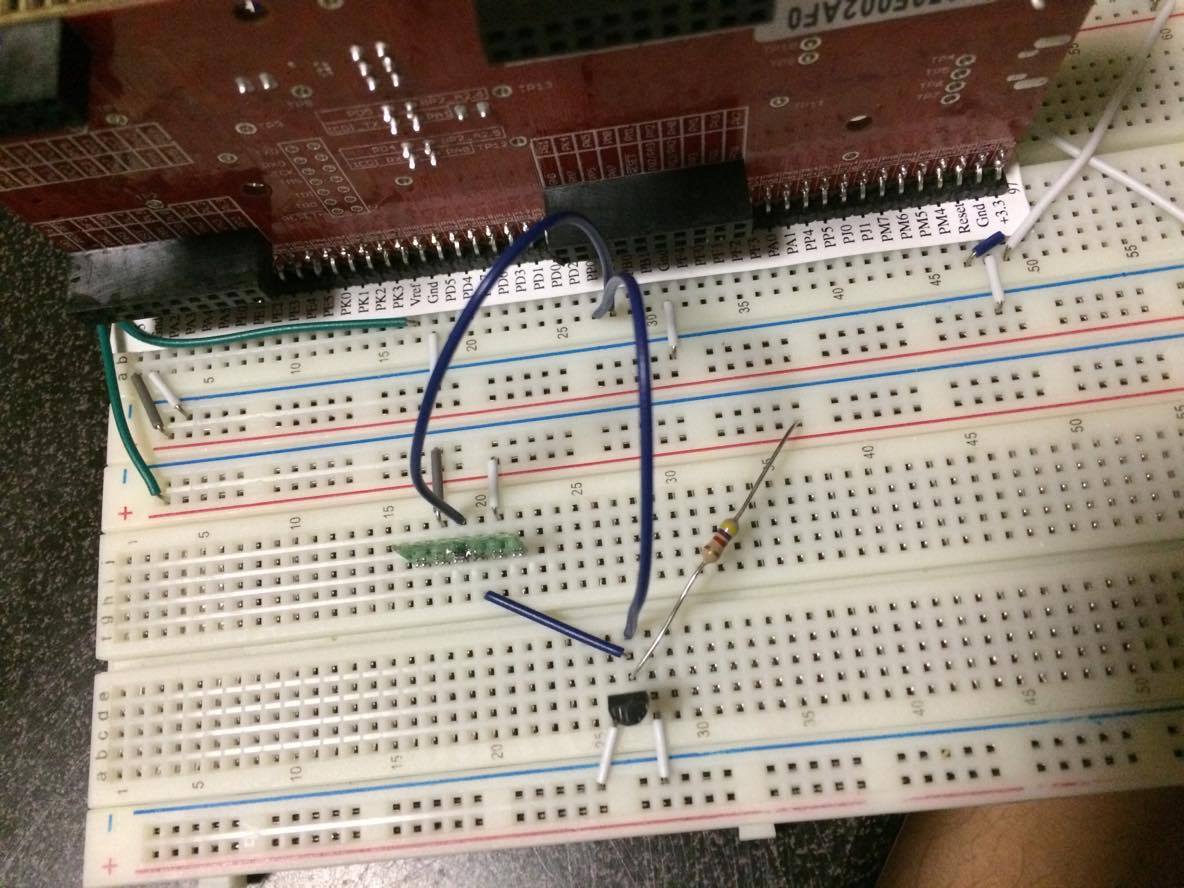
Here is a picture of how it looks. I'm quite sure that it's correct, but then I could have overlooked something. The sensor (black device at bottom) has its GND and VCC pin both connected to ground (as the DQ line can be both data and power). The DQ line (middle) is pulled up by a 4.7k Ohm resistor (with a 5V power supply). It is also connected to both the TX and RX pin from the launchpad. The RX wire is the wire directly from the device to the launchpad. The TX wire is the wire going from the device to the open-drain buffer NC7WZ07, and then to the launchpad. And then I have the white and gray wire which are for GND and VCC for the NC7WZ07.
Below is my code for UART module initialization:
void InitUART(uint32_t g_ui32SysClock)
{
//
// Enable the peripherals to be used.
//
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART5);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART6);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART7);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOC);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOP);
//
// Waits for peripherals to be ready.
//
while (!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_UART5) &&
!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_UART6) &&
!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_UART7) &&
!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOC) &&
!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOP));
//
// Configure GPIO Pins for UART mode.
//
MAP_GPIOPinConfigure(GPIO_PC6_U5RX);
MAP_GPIOPinConfigure(GPIO_PC7_U5TX);
MAP_GPIOPinConfigure(GPIO_PP0_U6RX);
MAP_GPIOPinConfigure(GPIO_PP1_U6TX);
MAP_GPIOPinConfigure(GPIO_PC4_U7RX);
MAP_GPIOPinConfigure(GPIO_PC5_U7TX);
MAP_GPIOPinTypeUART(GPIO_PORTC_BASE, GPIO_PIN_4 | GPIO_PIN_5 |
GPIO_PIN_6 |GPIO_PIN_7);
MAP_GPIOPinTypeUART(GPIO_PORTP_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Initialize the UARTs. Set the baud rate, number of data bits, turn off
// parity, number of stop bits, and stick mode.
//
MAP_UARTConfigSetExpClk(UART5_BASE, g_ui32SysClock, 115200,
UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE | UART_CONFIG_PAR_NONE);
MAP_UARTConfigSetExpClk(UART6_BASE, g_ui32SysClock, 115200,
UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE | UART_CONFIG_PAR_NONE);
MAP_UARTConfigSetExpClk(UART7_BASE, g_ui32SysClock, 115200,
UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE | UART_CONFIG_PAR_NONE);
}
Below is the code for reading in values from the FIFO:
uint32_t checkTemperature()
{
int32_t temperature_value_1 = 0;
int32_t temperature_value_2 = 0;
int32_t temperature_value_3 = 0;
//
// Check for values. Loop until values are placed into the receive FIFO.
//
while (!MAP_UARTCharsAvail(UART5_BASE) &&
!MAP_UARTCharsAvail(UART6_BASE) &&
!MAP_UARTCharsAvail(UART7_BASE));
//
// Get the values in the receive FIFO.
//
while ((temperature_value_1 =
MAP_UARTCharGetNonBlocking(UART5_BASE)) == -1);
while ((temperature_value_2 =
MAP_UARTCharGetNonBlocking(UART6_BASE)) == -1);
while ((temperature_value_3 =
MAP_UARTCharGetNonBlocking(UART7_BASE)) == -1);
//
// Display temperature values
//
UARTprintf("temperature_value_1 = %i\ntemperature_value_2 = %i\n"
"temperature_value_3 = %i\n", temperature_value_1,
temperature_value_2, temperature_value_3);
return STATUS_NORMAL;
}
Right now, the code is going into checkTemperature() once, and the the first time through it prints out the value 1280 for all three values. When it enters the function again the second time, it gets stuck at the "// Check for values. Loop until values are placed into the receive FIFO." loop. I'm not exactly sure how the control flow is supposed to be, and how to get it to continuously read in values. Also, the value 1280 seems incorrect, as I tried to hold the sensor with my fingers to warm it up, but the value read in was still 1280.
Any help would be greatly appreciated.
Thanks.
