Hello,
I'm trying to communicate with the chip FT5306, which is a Capacitive Touch Panel Controller. It already came pre-assembled on a controller board, and I used a 6-pin ribbon cable to connect the launchpad to that controller board witt the FT5306 on it. The 6 pins are: 1) VDD; 2) GND; 3) SCL; 4) SDA; 5) INT; 6) RESET. When I press down on the touch panel, the INT signal goes LOW, showing detection, so I know that that part is connected properly. However, when I try to send and read data to the touch panel, it doesn't seems to be doing anything. Thus, I believe that if I can solve my problem with the I2C communication, my other problem should also go away as well.
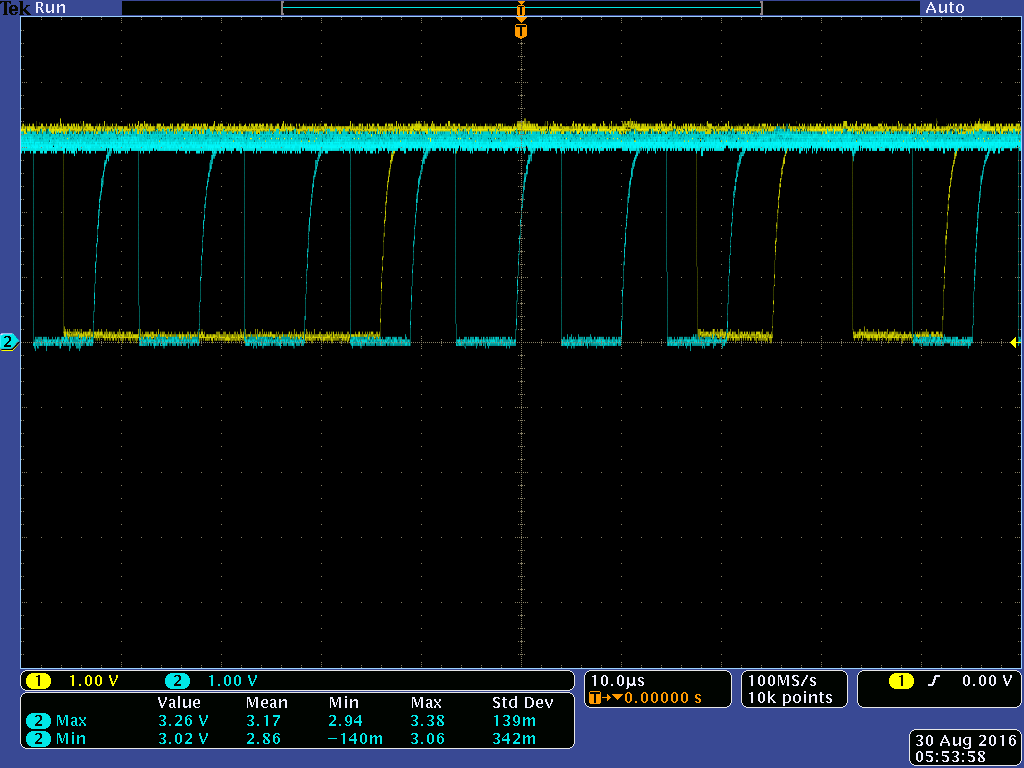
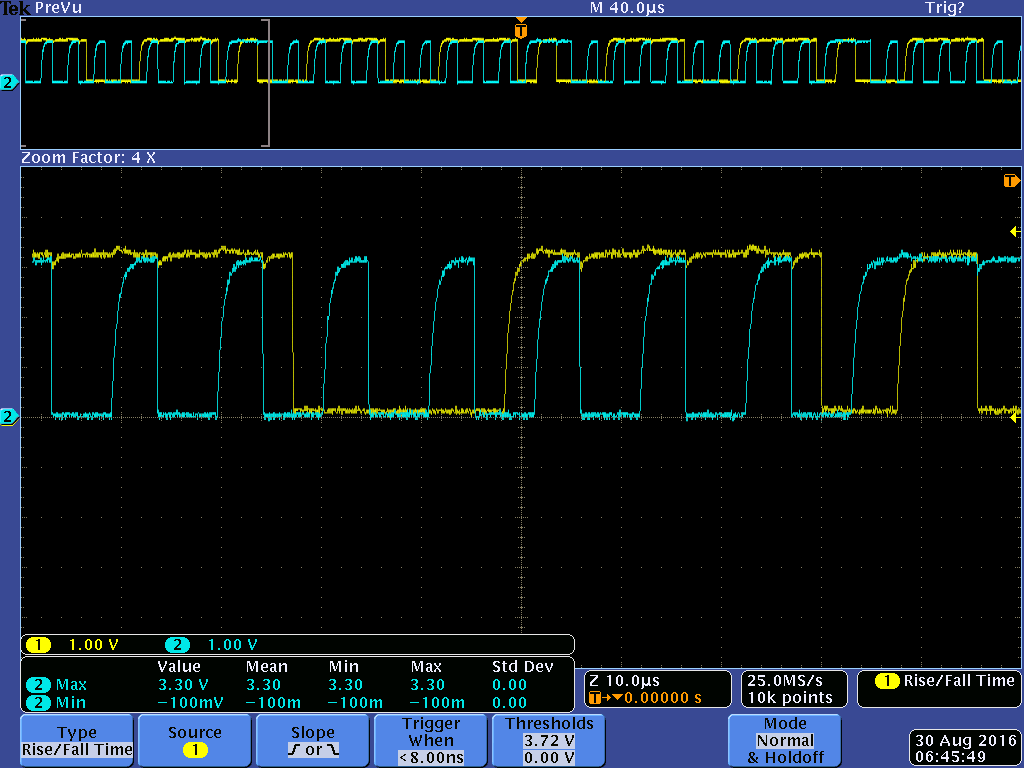
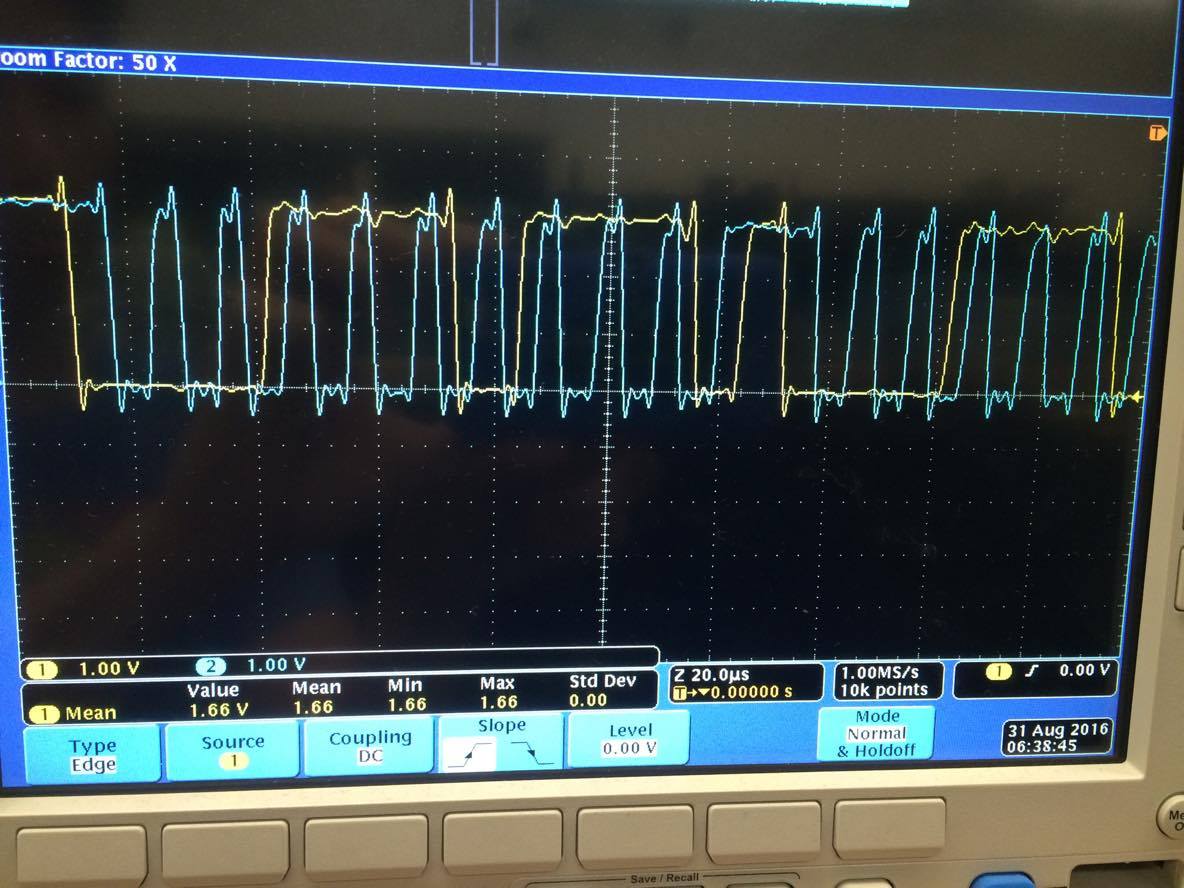
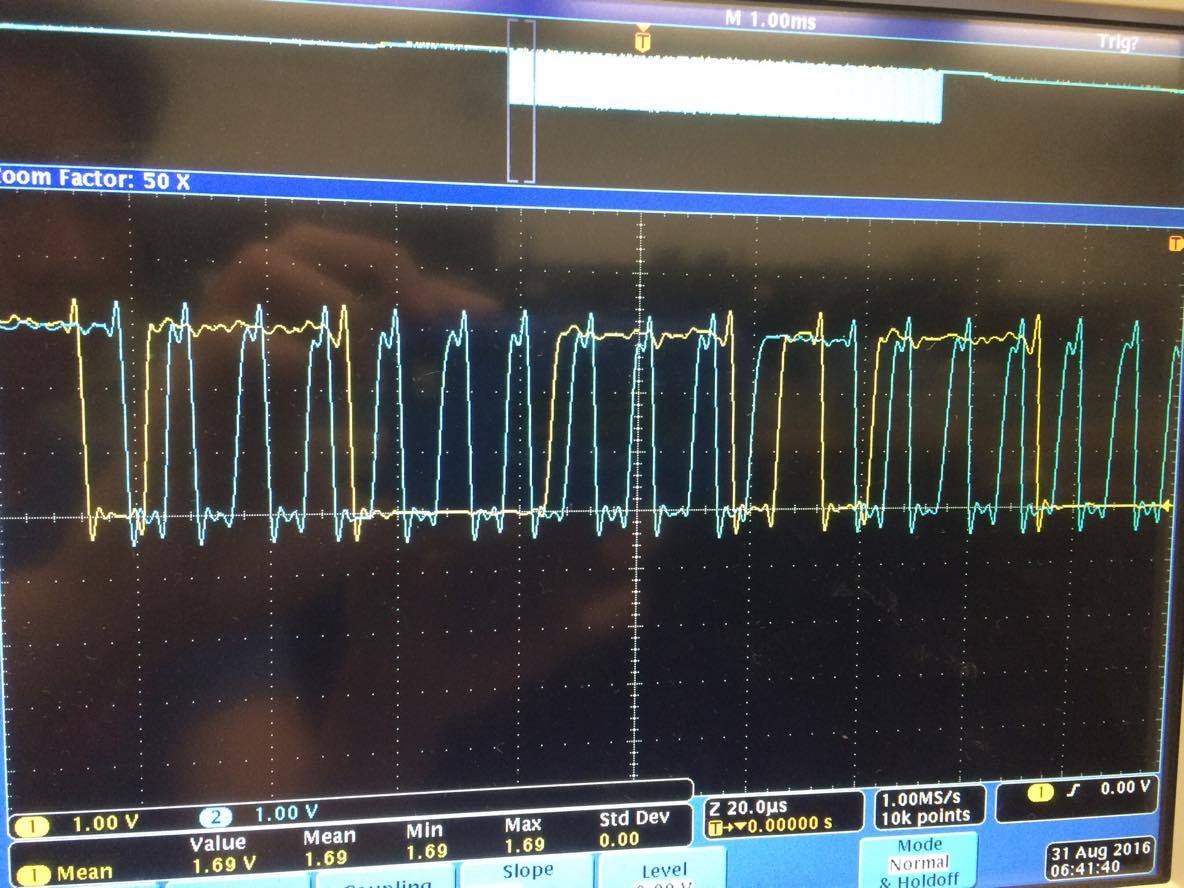
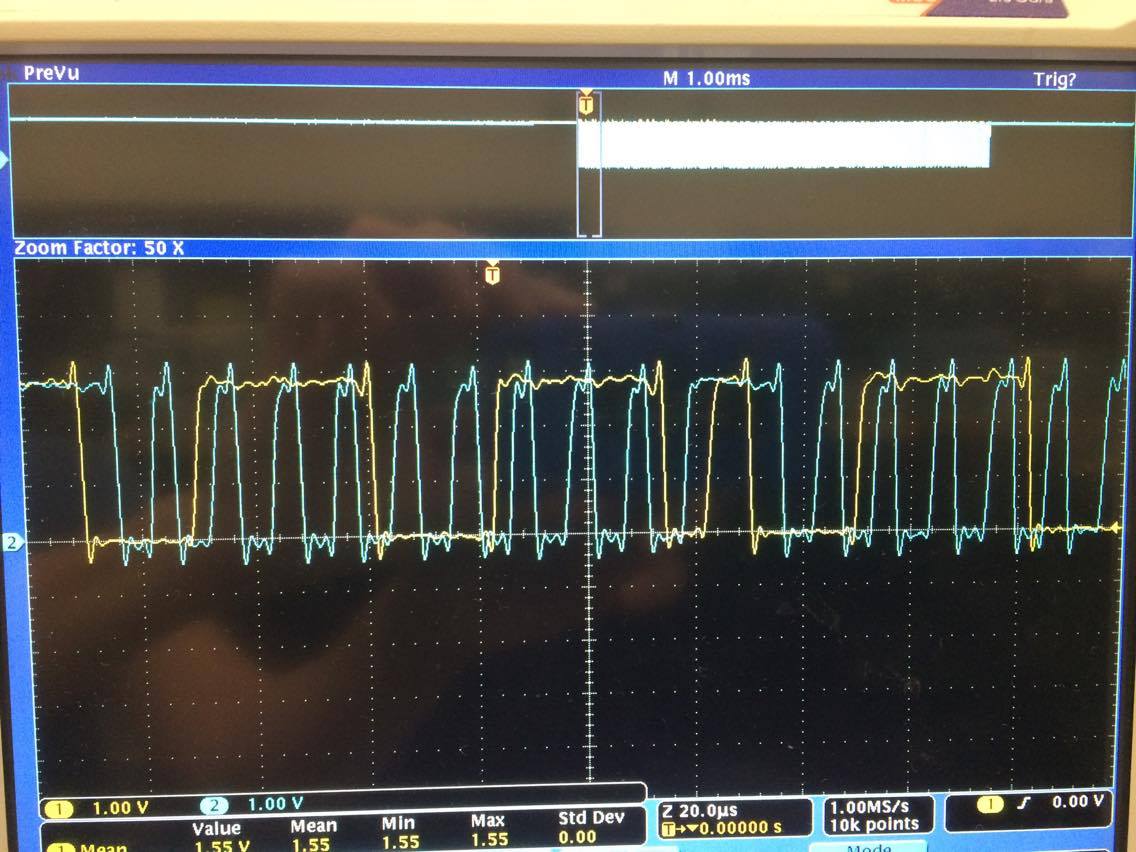
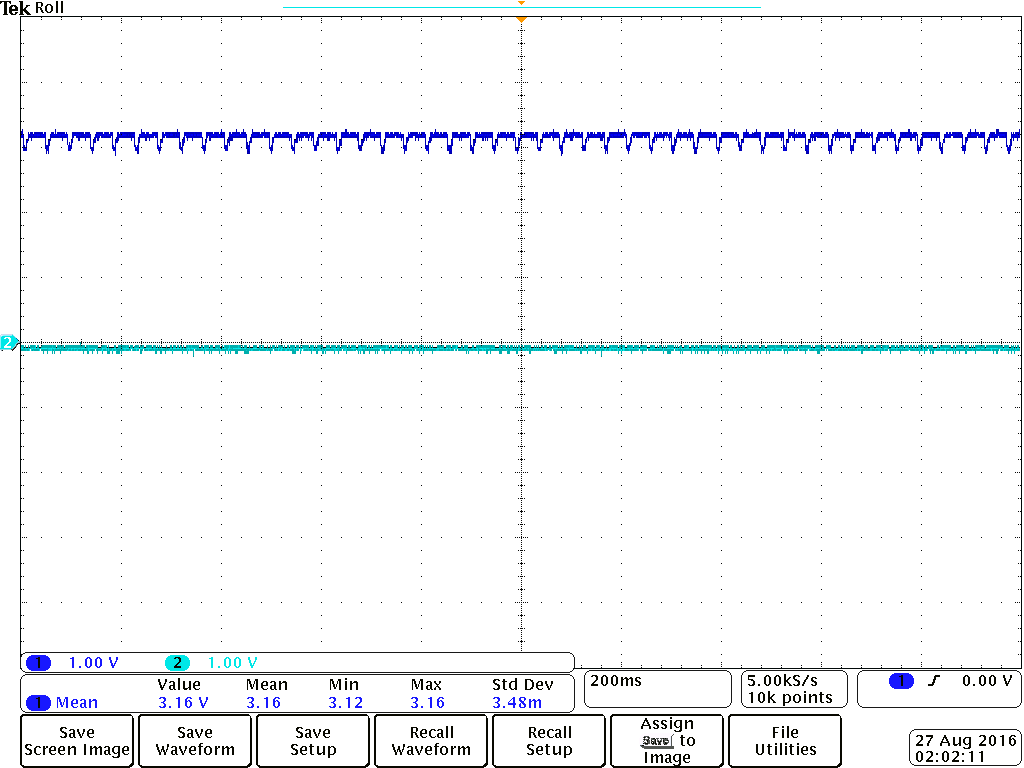
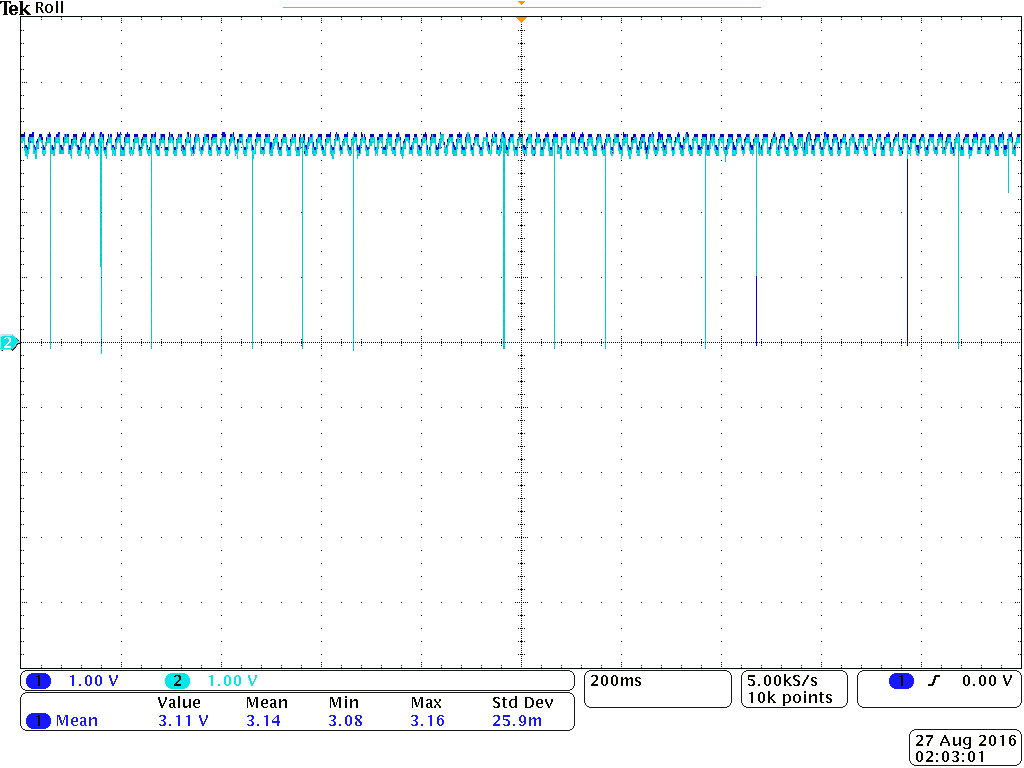
I hooked up an oscilloscope and attached 2 probes, one to the SDA signal and one to the SCL signal. The waveform looks.....wack. It doesn't look like a normal I2C waveform (based on the pictures I've seen online; I'm very new to I2C). Also, I would like to mention that I have a 4.7 kOhm pull-up resistor on both SDA and SCL (not sure if that's an okay resistance). So below are the 4 pics that I took of the oscilloscopes. The dark blue is SDA, while the teal is the SCL. The picture will be in the following order: 1) Probe on SDA, not touching the touch panel; 2) Probe on SDA, touching the panel; 3) Probe on SDA & SCL, no touch; 4) Probe on SDA & SCL, touch.


Here is my I2C initialization code:
void initTouchPanel()
{
//
// Enable the peripherals to be used.
//
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C0);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOL);
//
// Waits for peripherals to be ready.
//
while (!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_I2C0) &&
!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOL) &&
!MAP_SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOB));
//
// Configure PB2 and PB3 for I2C
//
MAP_GPIOPinConfigure(GPIO_PB2_I2C0SCL);
MAP_GPIOPinConfigure(GPIO_PB3_I2C0SDA);
//
// Select I2C function for PB2 and PB3
//
MAP_GPIOPinTypeI2CSCL(GPIO_PORTB_BASE, GPIO_PIN_2);
MAP_GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_3);
//
// Configure pin PL4 as input. INT. (Remember to change to PL6 later)
//
MAP_GPIOPinTypeGPIOInput(GPIO_PORTL_BASE, GPIO_PIN_4);
//
// Configure pin PL5 as output. RESET. (Remember to change to PL7 later)
//
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTL_BASE, GPIO_PIN_5);
//
// Drive PL5 HIGH. (Data sheet says to keep it HIGH).
//
MAP_GPIOPinWrite(GPIO_PORTL_BASE, GPIO_PIN_5, 0x20);
}
Interface Functions:
bool touchPanelInputDetect()
{
int32_t interrupt_signal = 0;
//
// Read interrupt signal sent from touch panel.
//
interrupt_signal = MAP_GPIOPinRead(GPIO_PORTL_BASE, GPIO_PIN_4);
//
// Input detected if interrupt signal is LOW.
//
if (!interrupt_signal)
{
return true;
}
return false;
}
void touchPanelReset(uint32_t g_ui32SysClock)
{
MAP_GPIOPinWrite(GPIO_PORTL_BASE, GPIO_PIN_5, 0x00);
MAP_SysCtlDelay(g_ui32SysClock / 3 / 2); // 500 ms delay
MAP_GPIOPinWrite(GPIO_PORTL_BASE, GPIO_PIN_5, 0x20);
}
void touchPanelRead(uint32_t g_ui32SysClock)
{
uint32_t touch_points = 0;
//
// Configure and enable master.
//
MAP_I2CMasterInitExpClk(I2C0_BASE, g_ui32SysClock, false);
//
// Set slave address.
//
MAP_I2CMasterSlaveAddrSet(I2C0_BASE, 0x39, true);
//
// Initiate master single receive.
//
MAP_I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_SINGLE_RECEIVE);
//
// Wait for master to finish transaction.
//
while (MAP_I2CMasterBusy(I2C0_BASE));
//
// Perform error check.
//
if (MAP_I2CMasterErr(I2C0_BASE) == I2C_MASTER_ERR_NONE)
{
//
// Get data from touch panel.
//
touch_points = MAP_I2CMasterDataGet(I2C0_BASE);
UARTprintf("%d touch points detected.\n\n", touch_points);
}
else
{
UARTprintf("Error = %d\n\n", MAP_I2CMasterErr(I2C0_BASE));
}
}
void touchPanelWrite(uint32_t g_ui32SysClock, uint8_t ui8Data)
{
//
// Configure and enable master.
//
MAP_I2CMasterInitExpClk(I2C0_BASE, g_ui32SysClock, false);
//
// Set slave address.
//
MAP_I2CMasterSlaveAddrSet(I2C0_BASE, 0x38, false);
//
// Place data to be send into FIFO.
//
MAP_I2CMasterDataPut(I2C0_BASE, ui8Data);
//
// Initiate master single send.
//
MAP_I2CMasterControl(I2C0_BASE, I2C_MASTER_CMD_SINGLE_SEND);
//
// Wait for master to finish transaction.
//
while (MAP_I2CMasterBusy(I2C0_BASE));
//
// Perform error check.
//
if (MAP_I2CMasterErr(I2C0_BASE) == I2C_MASTER_ERR_NONE)
{
return;
}
UARTprintf("Error = %d\n\n", MAP_I2CMasterErr(I2C0_BASE));
}
Sorry for the long post. I don't think there's anything wrong with my code, but since I'm new to I2C, there probably is. I based it off of the examples from the Tiva C library.