I'm back with another SPI question.
I am still using the TM4C1294 development board, but this time I am trying to get an external SPI SRAM chip to work. The SRAM being used is a Microchip brand 23LC1024.
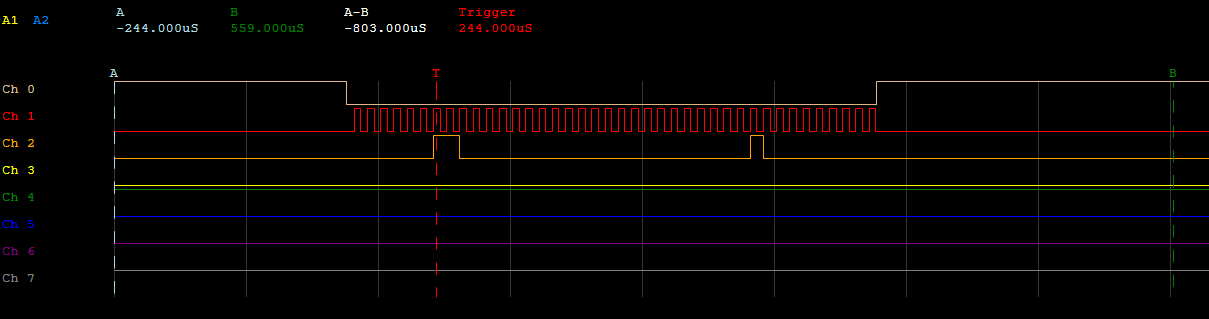
The issue I am having is that the SRAM chip is not sending data back to me under any circumstance. I am not sure if my issue is code or hardware at this point because both seem to follow what I can find every where else on the web. Code and Connections below. I use an oscilloscope on all four lines and I see exactly what i expect sent to the SRAM but that is all.
Any help is appreciated as I am stuck.
Connections to 23LC1024:
Pin 1: CS: Pulled up through 10k resistor, connected to PQ1 on board
Pin2: SO: connected to PQ3
Pin3: connected to 3.3V
Pin4: Vss: connect to ground
Pin5: SI: Connected to PQ2
Pin6: SCK: connected to PQ0
Pin7: connected to Vss Vcc
Pin8: Vss: connected to 3.3V (Edit as Pointed out by Amit)
Pin8: Vcc: connected to 3.3V
//*****************************************************************************
//
// spi_master.c - Example demonstrating how to configure SSI0 in SPI master
// mode.
//
// Copyright (c) 2010-2015 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
//
// This is part of revision 2.1.1.71 of the Tiva Firmware Development Package.
//
//*****************************************************************************
#include <stdbool.h>
#include <stdint.h>
#include <string.h>
#include <math.h>
#include "inc/hw_memmap.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/ssi.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/ustdlib.h"
#include "utils/uartstdio.h"
//*****************************************************************************
//
// This function sets up UART0 to be used for a console to display information
// as the example is running.
//
//*****************************************************************************
void InitConsole(void)
{
//
// Enable GPIO port A which is used for UART0 pins.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Configure the pin muxing for UART0 functions on port A0 and A1.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
//
// Enable UART0 so that we can configure the clock.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
//
// Use the internal 16MHz oscillator as the UART clock source.
//
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
//
// Select the alternate (UART) function for these pins.
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Initialize the UART for console I/O.
//
UARTStdioConfig(0, 115200, 16000000);
}
//*****************************************************************************
//
// Configure SSI0 in master Freescale (SPI) mode.
//
//*****************************************************************************
int main(void)
{
#if defined(TARGET_IS_TM4C129_RA0) || \
defined(TARGET_IS_TM4C129_RA1) || \
defined(TARGET_IS_TM4C129_RA2)
uint32_t ui32SysClock;
#endif
uint32_t junk = 0;
uint32_t pui32DataRx = 0;
//
// Set the clocking to run directly from the external crystal/oscillator.
// TODO: The SYSCTL_XTAL_ value must be changed to match the value of the
// crystal on your board.
//
#if defined(TARGET_IS_TM4C129_RA0) || \
defined(TARGET_IS_TM4C129_RA1) || \
defined(TARGET_IS_TM4C129_RA2)
ui32SysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN |
SYSCTL_USE_OSC), 120000000);
#else
SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN |
SYSCTL_XTAL_16MHZ);
#endif
//
// Set up the serial console to use for displaying messages. This is
// just for this example program and is not needed for SSI operation.
//
InitConsole();
//
// Display the setup on the console.
//
UARTprintf("\033[2J\033[H");
UARTprintf("SSI ->\n");
UARTprintf(" Mode: SPI\n");
UARTprintf(" Data: 16-bit\n\n");
//
// The SSI0 peripheral must be enabled for use.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3);
//
// For this example SSI0 is used with PortA[5:2]. The actual port and pins
// used may be different on your part, consult the data sheet for more
// information. GPIO port A needs to be enabled so these pins can be used.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOQ);
//
// Configure the pin muxing for SSI0 functions on port A2, A3, A4, and A5.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PQ0_SSI3CLK);
GPIOPinTypeGPIOOutput(GPIO_PORTQ_BASE, GPIO_PIN_1); //CS
GPIOPinConfigure(GPIO_PQ3_SSI3XDAT1);
GPIOPinConfigure(GPIO_PQ2_SSI3XDAT0);
//
// Configure the GPIO settings for the SSI pins. This function also gives
// control of these pins to the SSI hardware. Consult the data sheet to
// see which functions are allocated per pin.
// The pins are assigned as follows:
// PQ2 - SSI0Tx
// PQ3 - SSI0Rx
// PQ1 - SSI0Fss
// PQ0 - SSI0CLK
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeSSI(GPIO_PORTQ_BASE, GPIO_PIN_0 | /*GPIO_PIN_1 |*/ GPIO_PIN_2 | GPIO_PIN_3);
//
// Configure and enable the SSI port for SPI master mode. Use SSI0,
// system clock supply, idle clock level low and active low clock in
// freescale SPI mode, master mode, 1MHz SSI frequency, and 8-bit data.
// For SPI mode, you can set the polarity of the SSI clock when the SSI
// unit is idle. You can also configure what clock edge you want to
// capture data on. Please reference the datasheet for more information on
// the different SPI modes.
//
#if defined(TARGET_IS_TM4C129_RA0) || \
defined(TARGET_IS_TM4C129_RA1) || \
defined(TARGET_IS_TM4C129_RA2)
SSIConfigSetExpClk(SSI3_BASE, ui32SysClock, SSI_FRF_MOTO_MODE_1,
SSI_MODE_MASTER, 10000000, 8);
#else
SSIConfigSetExpClk(SSI3_BASE, SysCtlClockGet(), SSI_FRF_MOTO_MODE_0,
SSI_MODE_MASTER, 1000000, 32);
#endif
//
// Enable the SSI0 module.
//
SSIEnable(SSI3_BASE);
//
// Read any residual data from the SSI port. This makes sure the receive
// FIFOs are empty, so we don't read any unwanted junk. This is done here
// because the SPI SSI mode is full-duplex, which allows you to send and
// receive at the same time. The SSIDataGetNonBlocking function returns
// "true" when data was returned, and "false" when no data was returned.
// The "non-blocking" function checks if there is any data in the receive
// FIFO and does not "hang" if there isn't.
//
while(SSIDataGetNonBlocking(SSI3_BASE, &pui32DataRx))
{
}
uint32_t Reset = 0xff; //0b 1111 1111
uint32_t write = 0x01;
uint32_t write_2 = 0x40;
uint32_t read = 0x05;
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, GPIO_PIN_1);
SysCtlDelay(ui32SysClock / (10) );
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, 0);
// SSIDataPut(SSI3_BASE, Reset);
SSIDataPut(SSI3_BASE, write); //write to write mode register 0x01
SSIDataPut(SSI3_BASE, write_2); //Write the mode 0x40
SSIDataGet(SSI3_BASE, &junk); //Junk reads
SSIDataGet(SSI3_BASE, &junk);
// SSIDataGet(SSI3_BASE, &junk);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, GPIO_PIN_1);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, 0);
SSIDataPut(SSI3_BASE, read); //write to read mode register 0x05
SSIDataPut(SSI3_BASE, 0x00); //Junk write
SSIDataGet(SSI3_BASE, &junk); //Junk read, watching osciloscope for responces
SSIDataGet(SSI3_BASE, &junk);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, GPIO_PIN_1);
SysCtlDelay(ui32SysClock / (10) );
while(1)
{
//test write to the RAM at memory location 0x000002
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, 0);
SSIDataPut(SSI3_BASE, 0x02);
SSIDataPut(SSI3_BASE, 0x00);
SSIDataPut(SSI3_BASE, 0x00);
SSIDataPut(SSI3_BASE, 0x02);
SSIDataPut(SSI3_BASE, 0x44);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, GPIO_PIN_1);
//test read from RAM at memory location 0x000002
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, 0);
SSIDataPut(SSI3_BASE, 0x03);
SSIDataPut(SSI3_BASE, 0x00);
SSIDataPut(SSI3_BASE, 0x00);
SSIDataPut(SSI3_BASE, 0x02);
SSIDataPut(SSI3_BASE, 0x00);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
SSIDataGet(SSI3_BASE, &junk);
GPIOPinWrite(GPIO_PORTQ_BASE, GPIO_PIN_1, GPIO_PIN_1);
//See results on osciloscope but in the event that the string is to long catch it in UART as well
int i;
for(i = 0; i < 1; i++)
{
UARTprintf("%x", junk);
}
UARTprintf("\n");
}
}