Other Parts Discussed in Thread: EK-TM4C129EXL
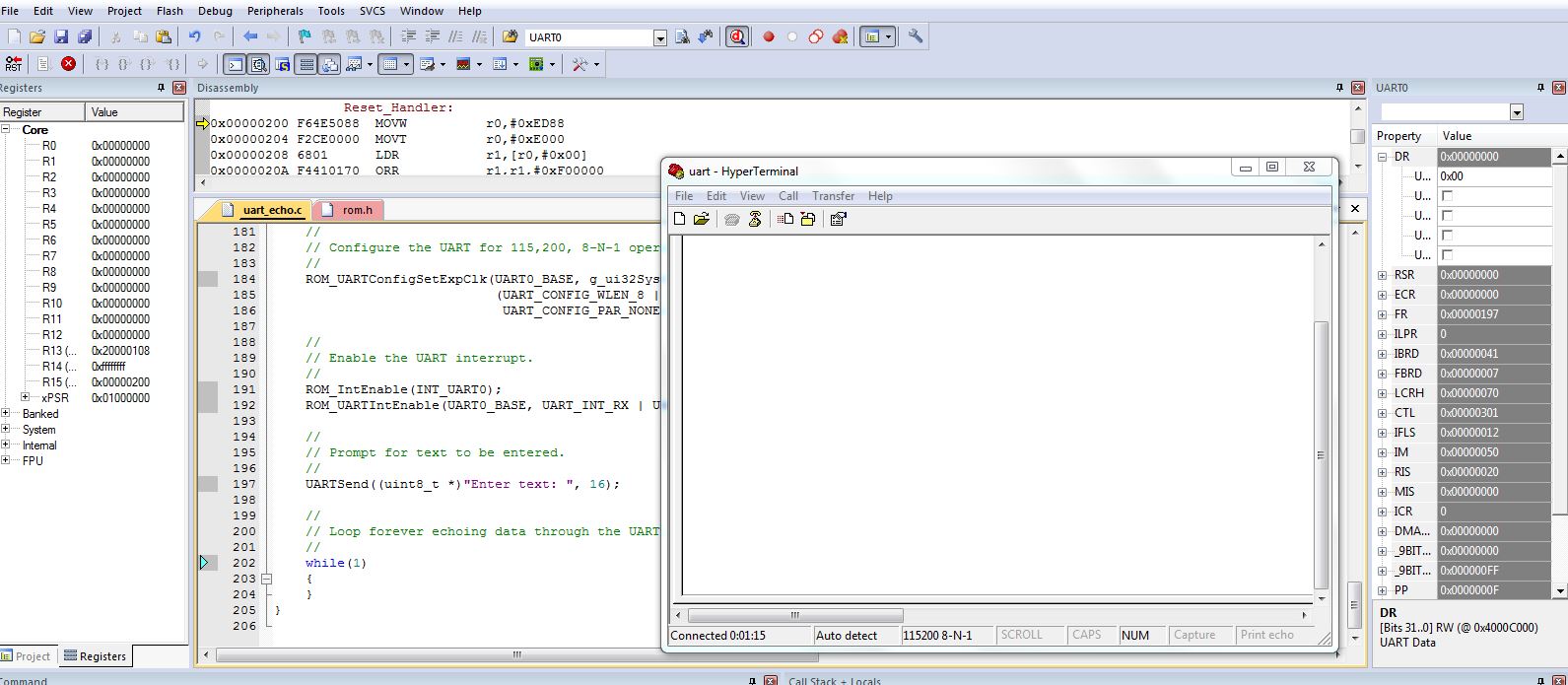
I am just a beginner to TM4C129 uC. I am facing a problem that the Interrupt is not getting triggered while trying do the UART0 interface using the example code provided. Could some help me to troubleshoot the mistake?. The launch pad used is EK-TM4C129EXL. Thanks in advance.
#include <stdint.h>
#include <stdbool.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "driverlib/debug.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom.h"
#include "driverlib/rom_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
//*****************************************************************************
//
//! \addtogroup example_list
//! <h1>UART Echo (uart_echo)</h1>
//!
//! This example application utilizes the UART to echo text. The first UART
//! (connected to the USB debug virtual serial port on the evaluation board)
//! will be configured in 115,200 baud, 8-n-1 mode. All characters received on
//! the UART are transmitted back to the UART.
//
//*****************************************************************************
//****************************************************************************
//
// System clock rate in Hz.
//
//****************************************************************************
uint32_t g_ui32SysClock;
//*****************************************************************************
//
// The error routine that is called if the driver library encounters an error.
//
//*****************************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
//*****************************************************************************
//
// The UART interrupt handler.
//
//*****************************************************************************
void
UARTIntHandler(void)
{
uint32_t ui32Status;
//
// Get the interrrupt status.
//
ui32Status = ROM_UARTIntStatus(UART0_BASE, true);
//
// Clear the asserted interrupts.
//
ROM_UARTIntClear(UART0_BASE, ui32Status);
//
// Loop while there are characters in the receive FIFO.
//
while(ROM_UARTCharsAvail(UART0_BASE))
{
//
// Read the next character from the UART and write it back to the UART.
//
ROM_UARTCharPutNonBlocking(UART0_BASE,
ROM_UARTCharGetNonBlocking(UART0_BASE));
//
// Blink the LED to show a character transfer is occuring.
//
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0, GPIO_PIN_0);
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0, 1);
//
// Delay for 1 millisecond. Each SysCtlDelay is about 3 clocks.
//
SysCtlDelay(g_ui32SysClock / (1000 * 3));
//
// Turn off the LED
//
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0, 0);
}
}
//*****************************************************************************
//
// Send a string to the UART.
//
//*****************************************************************************
void
UARTSend(const uint8_t *pui8Buffer, uint32_t ui32Count)
{
//
// Loop while there are more characters to send.
//
while(ui32Count--)
{
//
// Write the next character to the UART.
//
ROM_UARTCharPutNonBlocking(UART0_BASE, *pui8Buffer++);
}
}
//*****************************************************************************
//
// This example demonstrates how to send a string of data to the UART.
//
//*****************************************************************************
int
main(void)
{
//
// Set the clocking to run directly from the crystal at 120MHz.
//
g_ui32SysClock = MAP_SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |
SYSCTL_OSC_MAIN |
SYSCTL_USE_PLL |
SYSCTL_CFG_VCO_480), 120000000);
//
// Enable the GPIO port that is used for the on-board LED.
//
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPION);
//
// Enable the GPIO pins for the LED (PN0).
//
ROM_GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE, GPIO_PIN_0);
//
// Enable the peripherals used by this example.
//
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Enable processor interrupts.
//
ROM_IntMasterEnable();
//
// Set GPIO A0 and A1 as UART pins.
//
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
ROM_GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Configure the UART for 115,200, 8-N-1 operation.
//
ROM_UARTConfigSetExpClk(UART0_BASE, g_ui32SysClock, 115200,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
//
// Enable the UART interrupt.
//
ROM_IntEnable(INT_UART0);
ROM_UARTIntEnable(UART0_BASE, UART_INT_RX | UART_INT_RT);
//
// Prompt for text to be entered.
//
UARTSend((uint8_t *)"\033[2JEnter text: ", 16);
//
// Loop forever echoing data through the UART.
//
while(1)
{
}
}