

Other Parts Discussed in Thread: HALCOGEN
Tool/software: Code Composer Studio
Hello,
I am learning how to use the CAN of the TMS570 LS 12,I try to send a message from CAN1 to CAN 2 however, I can not get the message (the program is locked at: while(!canIsRxMessageArrived(canREG1,canMESSAGE_BOX2)); ) and I can not figure out why it does not work.
Here is my code:
void main(void)
{
/* USER CODE BEGIN (3) */
gioInit();
canInit();
unsigned char tx_data[8] = {'G','E','I','I','M','O','N','T'};
unsigned char rx_donnee[8] = {};
int n = 0;
int i = 0;
canEnableloopback(canREG1,Internal_Lbk);
canTransmit(canREG1,canMESSAGE_BOX1,tx_data);
while(!canIsRxMessageArrived(canREG1,canMESSAGE_BOX2));
canGetData(canREG1,canMESSAGE_BOX2,rx_donnee);
for (i=0;i<=8;i++);
{
if(tx_data[i]!=rx_donnee[i])
{
n = 1;
}
}
if(n==0)
{
gioToggleBit(gioPORTB, 1);
}
while (1);
//xTaskCreate(firstTask, "task1", 128, 0, 2, 0);
//vTaskStartScheduler();
/* USER CODE END */
}
And here is my configuration of HALCOGEN:
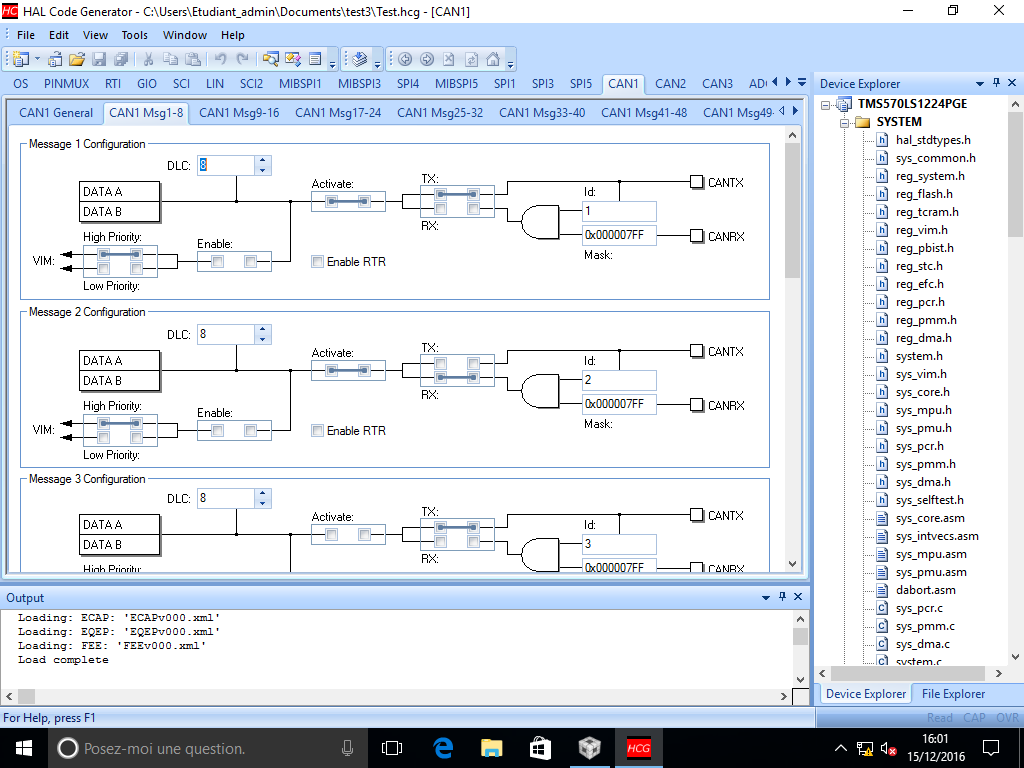

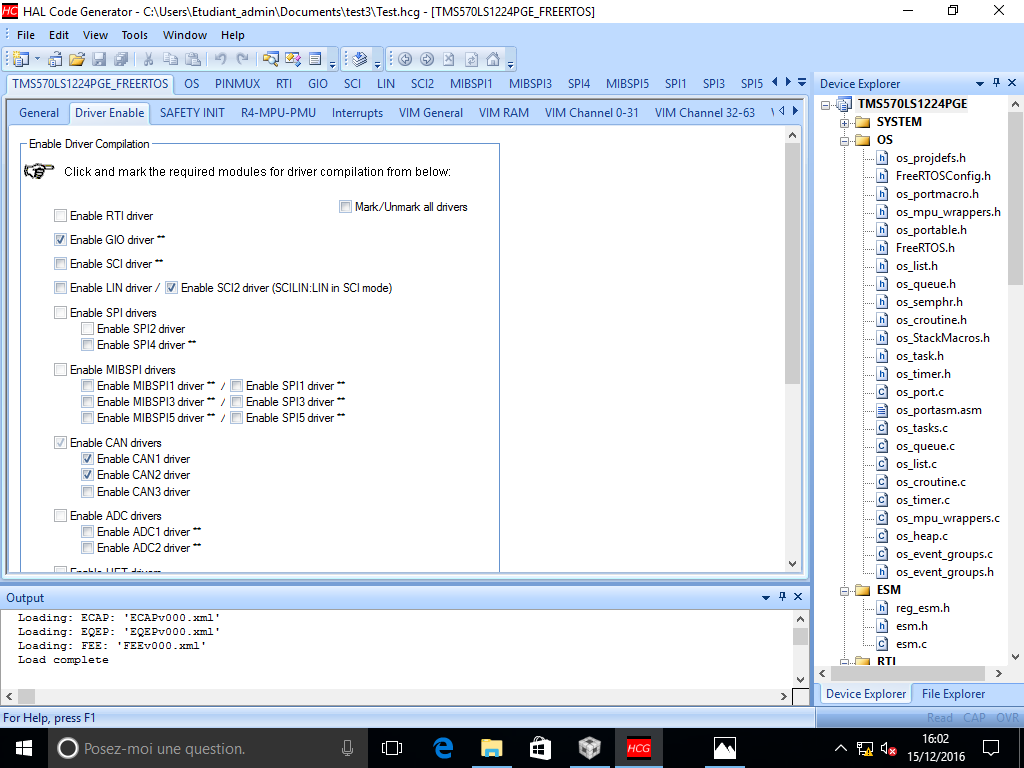
This is the first time I use this type of microcontroller and I do not understand why it does not work.
Does Someone can help me ?
Regards.

